You're reading the documentation for a development version. For the latest released version, please have a look at master.
Euler Angle Order
One of the common issue you will encounter when you start working with Vision and robot is the Euler Angle Order. EUler Angle is the order of Orientation for robot poses. They are also referred as rotations(rx, ry & rz). The orders for these orientation will affect the actual robot’s poses. Therefore, you should pay attention on the robot & Vision Euler Angle orders for communications.
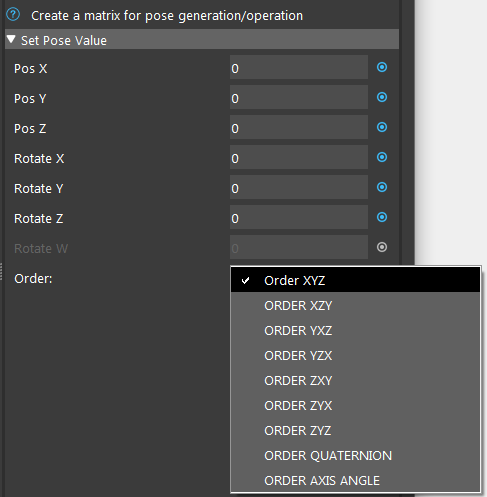
Different robots have different orders for their Euler Angle. Since these order is fixed when the robot is manufactured. We can alter the Euler Angle on Vision side to match the Euler Angle on different robots. As the image shown above, there is an option Order in Vision. This is the order for different Euler Angle.
This is important when working with a new robot or a robot which you are not familiar with. Vision is using XYZ order by default. If you do not change this Euler Angle order, robot will read the pose differently. Below is an example of applying the wrong Euler Angle:
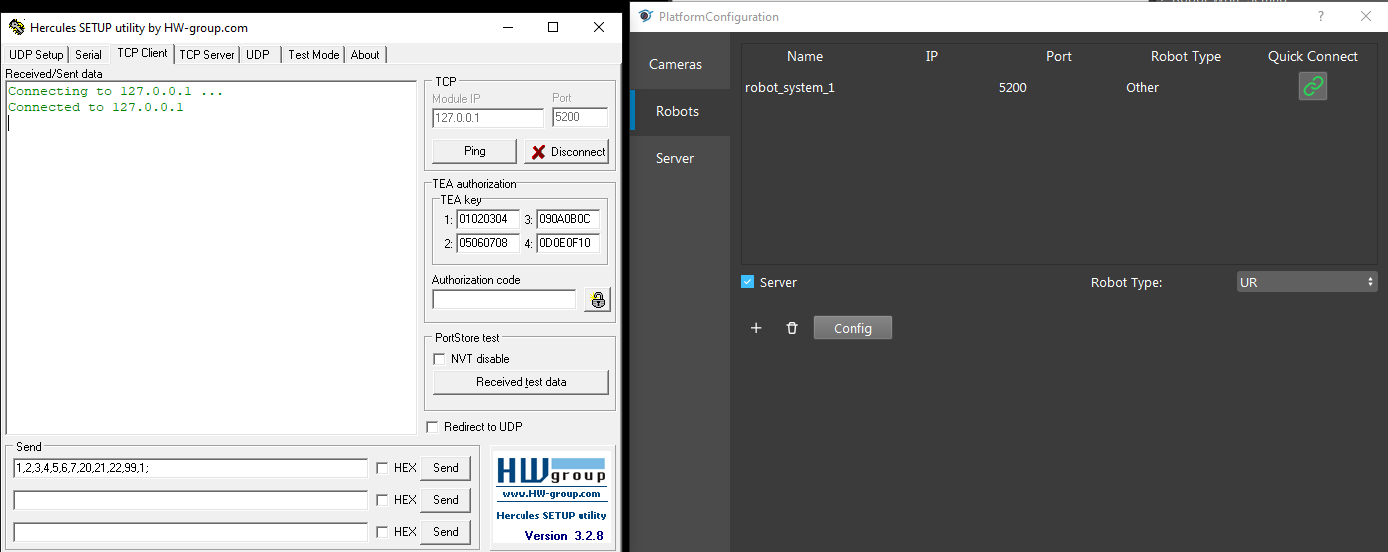
Here we connected Hercules virtual robot to Vision. And Hercules will the the message 1,2,3,4,5,6,7,20,21,22,99,1; to Vision.
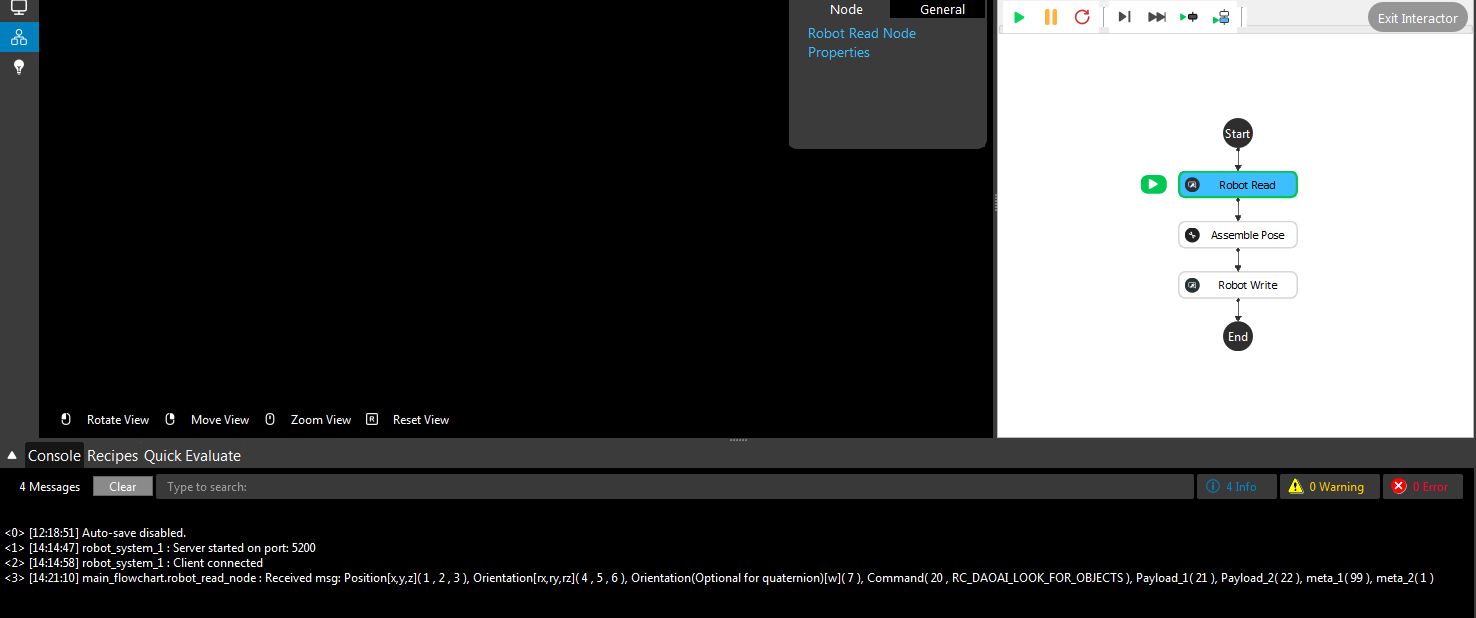
On Vision side, we receive message with Robot Read node. The message will display on the console. Pay attention to the Orientation vector: rx => 5, ry => 5, rz => 6.
Note
We recommend you to read Request and Response for details about robot communication, so that you will have a better understanding of the rest of the article.
And keep in mind that Vision has Euler Angle order of XYZ by default. Therefore the Orientation is XYZ order => rx, ry then rz.
The received message on Vision side is:
main_flowchart.robot_read_node : Received msg: Position[x,y,z]( 1 , 2 , 3 ), Orientation[rx,ry,rz]( 4 , 5 , 6 ), Orientation(Optional for quaternion)[w]( 7 ), Command( 20 , RC_DAOAI_LOOK_FOR_OBJECTS ), Payload_1( 21 ), Payload_2( 22 ), meta_1( 99 ), meta_2( 1 )
Then we put these number in Assemble Pose node and using default Order XYZ. Filling in the payloads in Robot Write node.
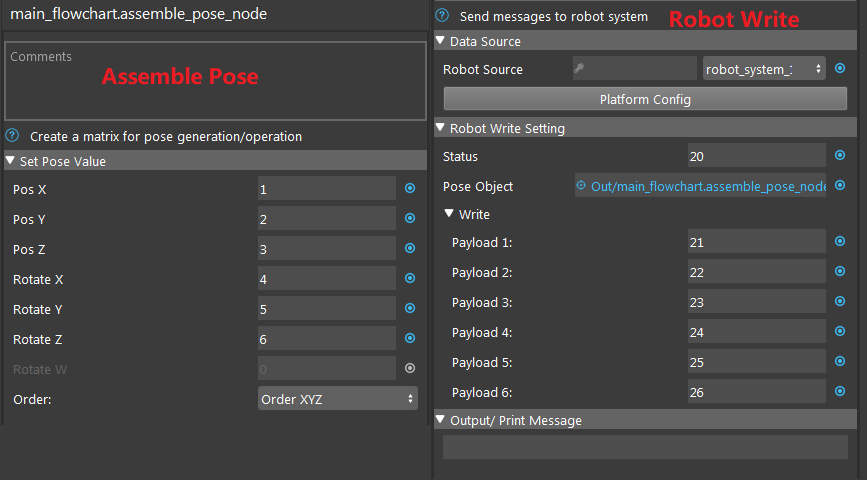
Then, sending this message by executing Robot Write node, you will see the message on Hercules side.
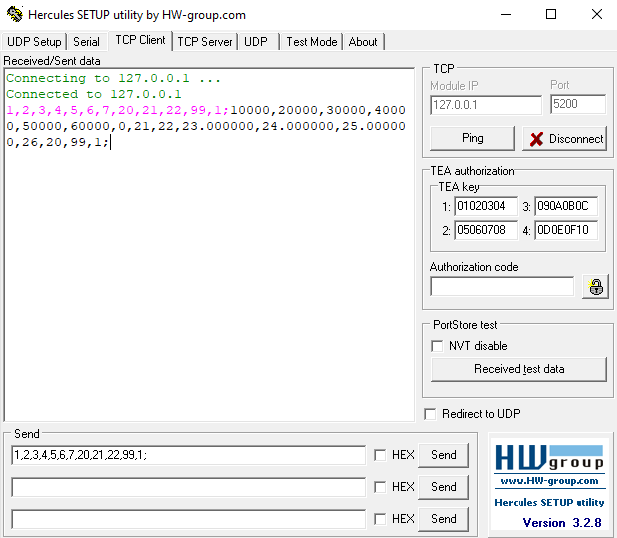
The received message on Hercules side is:
10000,20000,30000,40000,50000,60000,0,21,22,23.000000,24.000000,25.000000,26,20,99,1;
The order of orientation remains the same since we assemble the pose with Order XYZ.
Note
You might notice the pose Vision sent back is all multiply with 10000 in value. This is another factor which you need to pay attention to: the MULT factor in communication. You will see more information about this factor in the next article.
Now we will show you the message with different orders:
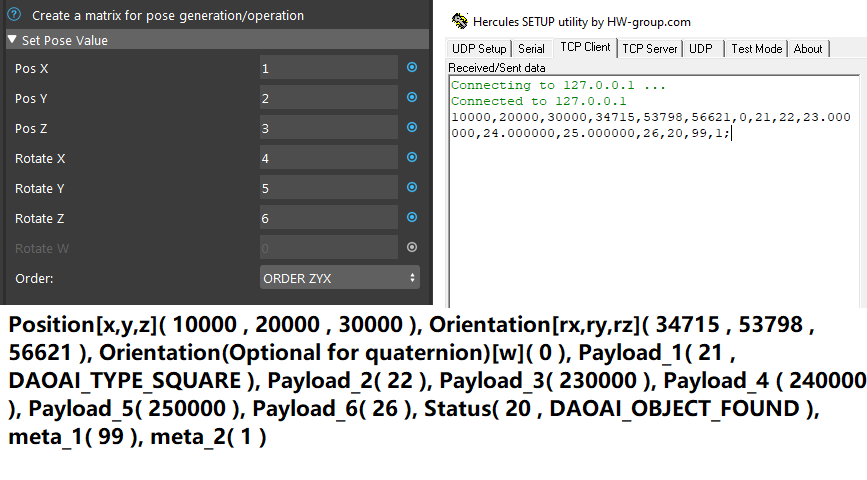
Order ZYX is another common order for robots. You can see even if we assemble the pose with exact same values, the actual pose robot receive is totally different. This could cause serious of failure in actual project or working environment. Hence, the Euler Angle is extremely important.
You use the example above to test your robot’s Euler Angle. If you see the values are matching, you found your Euler Angle order. Another way to find out what is your Euler Angle order, you can record all the calibration poses into .bag files. Calibrate with all these poses. You might see the Calibration error is larger than 10mm(usually 30-40mm). It means your Euler Angle order is not right. Exhausting all the other Euler Angle orders, you will find ONE Euler Angle order will calibrate with good error(usually error around 1mm or smaller is good). Then, this is the Euler Angle for your robot.