You're reading the documentation for a development version. For the latest released version, please have a look at master.
3D Transformation Concept
To use Vision Studio, some concepts of 3D transformation are necessary.
Pose and Transformation
- Pose stands for the position and rotation.
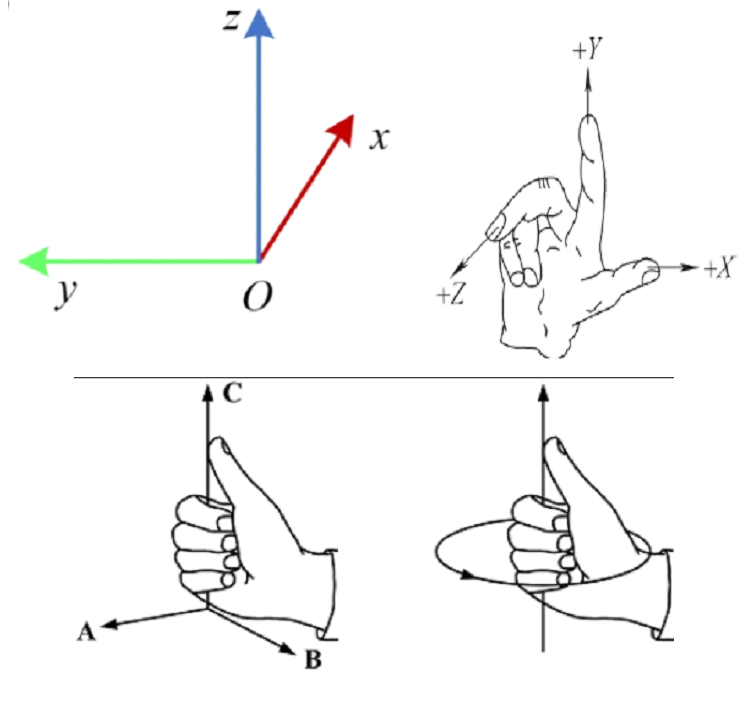
Position is usually represented by right hand rule, and R/G/B stands for X/Y/Z.
Rotation is represented by Euler angles(Rx, Ry, Rz) or Quaternions (a, b, c, w). Vision Studio use Euler angles by default.
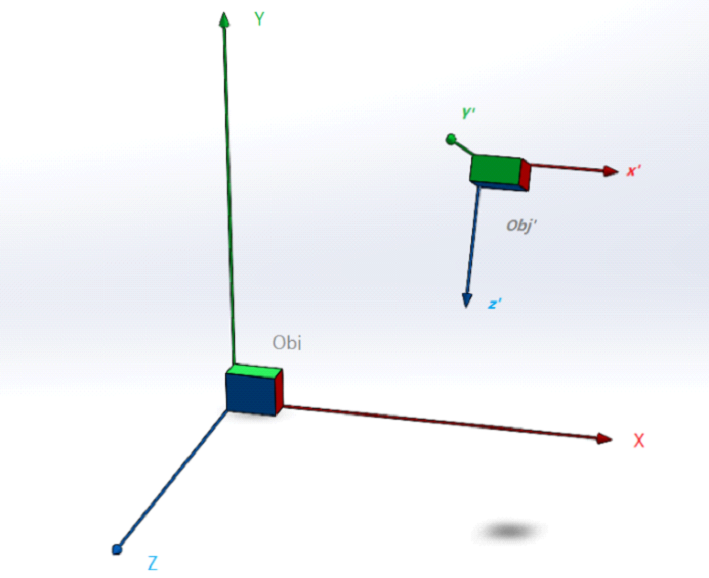
A transformation or pose of target (A) coordinate in reference (B) coordinate is represented by A in B .
Hint
For example, Obj initially is at the origin of reference coordinate (B) which is (0, 0, 0, 0, 0, 0), and we move the Obj to the position [100,100,50]. Afterwards, we rotate the Obj along it’s X axis for 60 degree. The final pose of Obj is [100, 100, 50, 60, 0, 0].
Caution
Talking about the orientation, we usually use Euler order to represent the orientation. Ane euler angle will need to have a specified rotation order. Different robot may have different conventions, for example ABB robot used the ZYX sequence. For more details, refer to the page
- Sources of pose and transformation in Vision Studio:
Robot Read
Calibrations (Calibration, Sphere Calibration, DA Calibration)
Detection nodes (Mod Finder, Reconstruct, Box Volume Estimation, Alignment)
Manually Define (Assemble Pose, Gripper)
Transformation Tree
- Transformation Tree is using known poses and transformations to calculate the unknowns.
Important
The process of detection, calibration and robot guidance all serves the core Transformation Tree, so understanding it’s concept is the very important.
How to Establish a Transformation Tree?
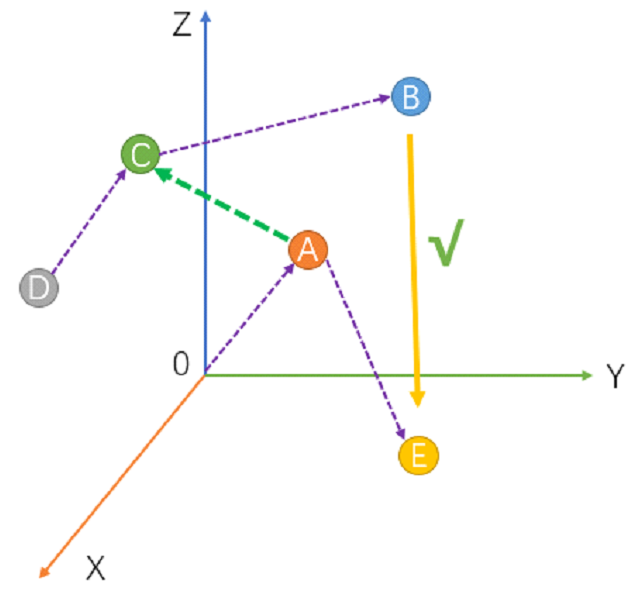
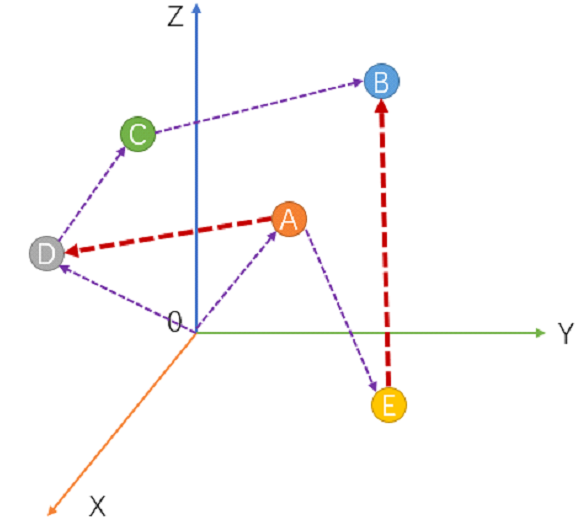
In the figure below, there are five objects ABCDE, and some of the relative positions are known, and constructed a transformation chain(Purple).
- Known transformations: [A in World] [E in A] [D in World] [C in D] [B in C]

Then the transformation between any two objects in the same transformation chain can be computed by transformation tree.
- [B in E] or [D in A] etc. are all in the same transformation chain thus able to be computed.
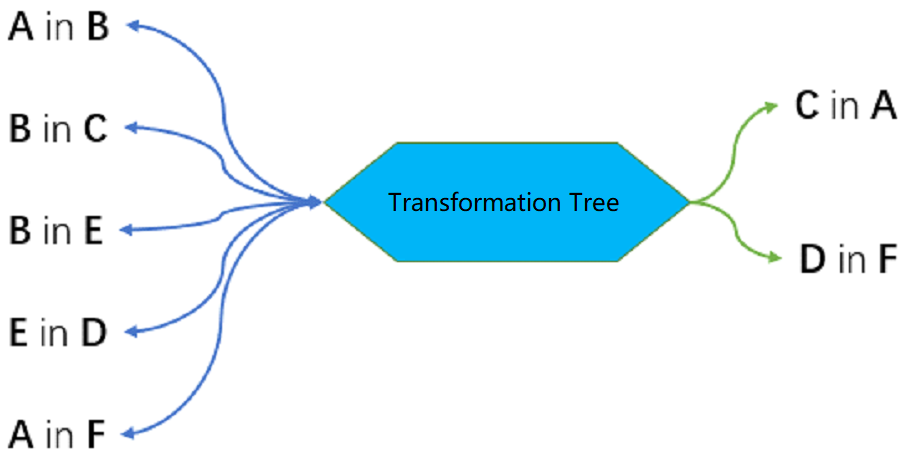
However, if two objects are not in the same transformation chain, their transformation cannot be computed. To be able to calculate the transformation, the transformation chain must be connected first.
- B and E are not in the same transformation chain.
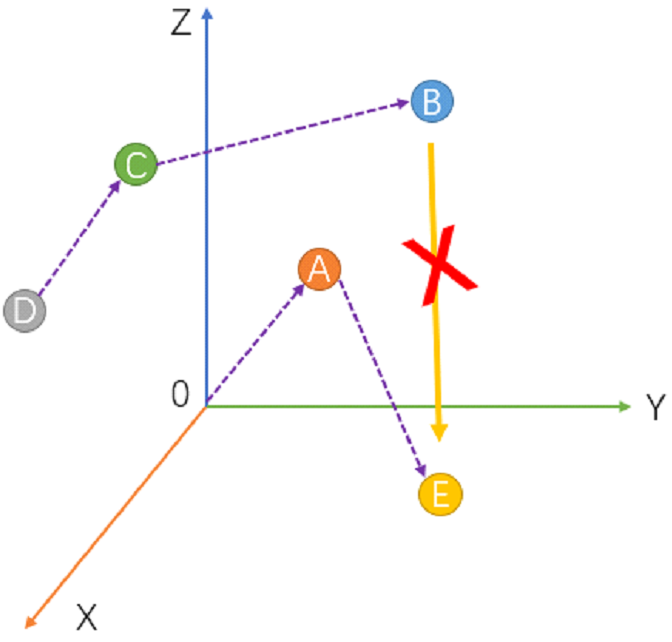
To acquire [B in E], first acquire any transformation that will make B and E be in the same transformation chain.
- For an example, [C in A].