Calibration Program
This page is about Universal Robot (alias as UR) specific instruction of Calibration. Please make sure you have read Installation and Setup and Calibration.
Note
The Calibration programs in default DaoAI package is ready to use. If you do not plan to change the Calibration process flow, we recommend to leave the program as it is. If you decided to modify the program, please make sure it matches the communication protocols with DaoAI Vision side. For detail of communication details please see Socket and Communication Flow .
The goal of Calibration is to confirm the relation between Robot Base and Camera(Camera to Base).
Different Calibration Programs
Manual Calibration
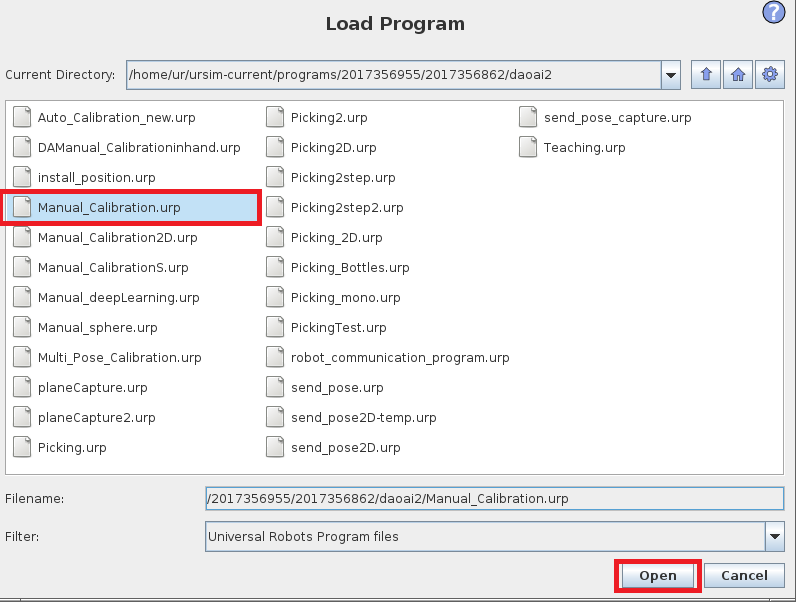
First of all, we opens up the Manual_Calibration.urp, connect robot with Vision.
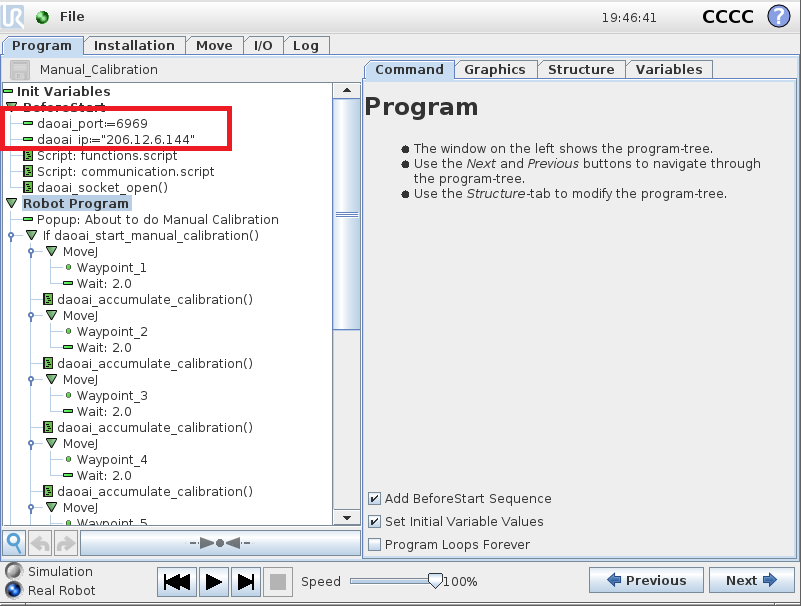
The program flow would looks like this:
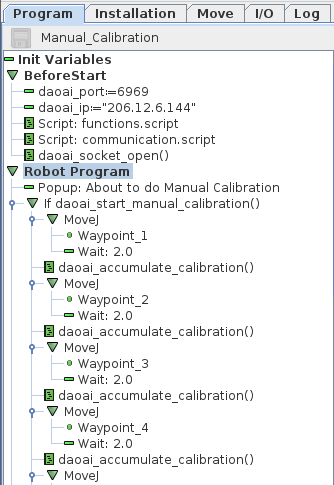
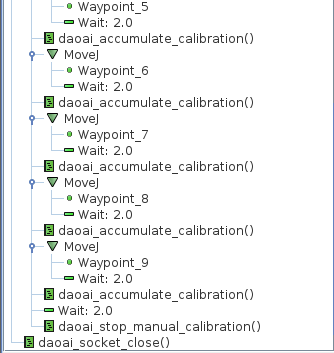
In this Manual Calibration sample program, robot opens socket connecting to Vision, traverse all the waypoints, then ends Calibration process and close the socket. In pseudo code:
Manual Calibration():
#Start Communication
daoai_start_manual_calibration() #Opens socket, sends start signal to Vision
#Accumulate Poses
if(vision is in Calibration_mode):
loop daoai_manual_accumulate_calibration():
move_robot(waypoint_n)
end_of_loop
#Depending on the type of Calibration, **Vision** or robot will trigger this stop signal
daoai_stop_manual_calibration() # Close socket and halt robot program
end_of_function
Auto Calibration
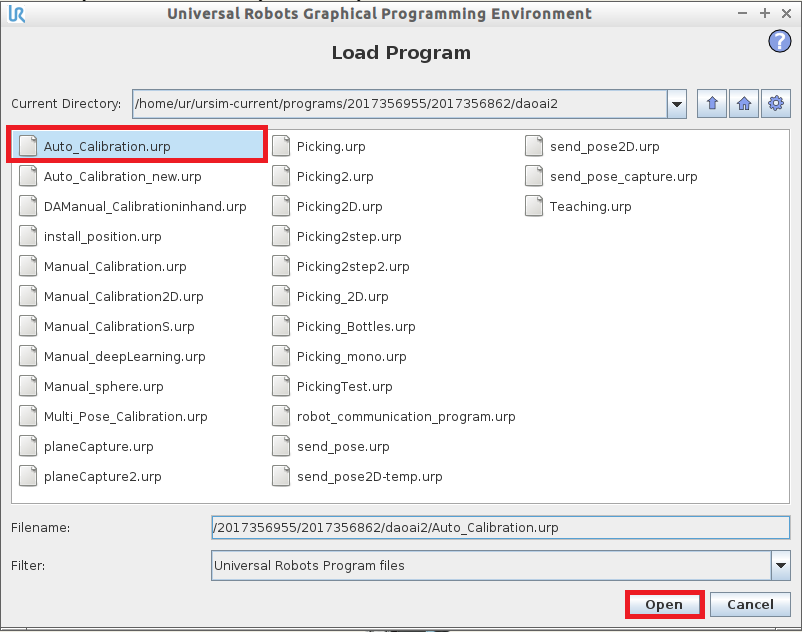
Opening up the Auto_Calibration.urp, connect robot with Vision.
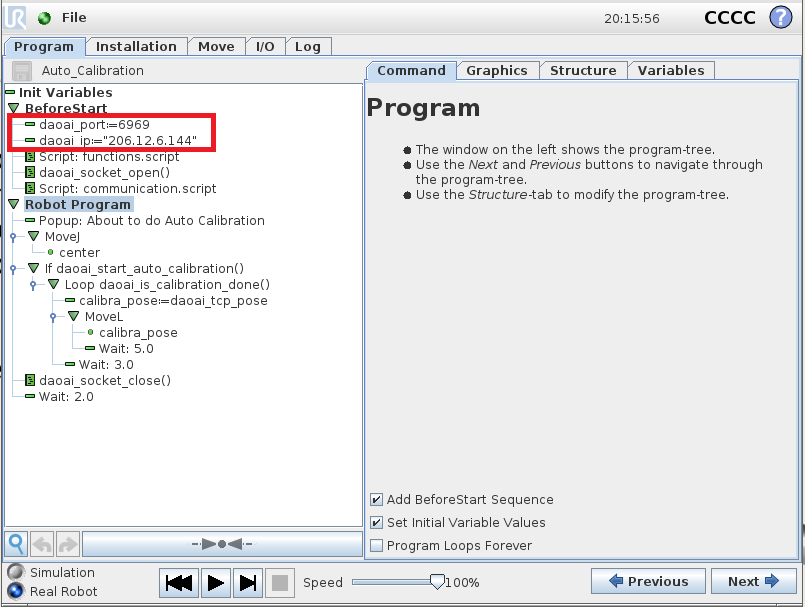
The program flow would looks like this:
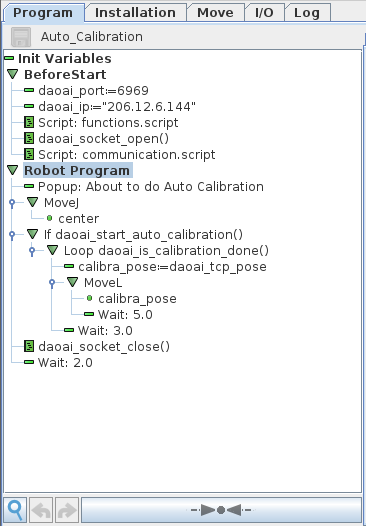
In this Auto Calibration sample program, robot opens socket connecting to Vision, sending message to Vision to confirm Auto Calibration process.
Repeat: UR sends the current pose to Vision; Vision accumulates the pose then calculates and replies back the next pose to UR; then UR moves to next pose;
Until Vision has collected enough poses, it sends a stop signal to UR terminating the Auto Calibration process. UR closes the socket. In pseudo code:
The Waypoints
Waypoints are important for the Calibration output. If the waypoints are not good, the Calibration output would have large error. Which would affect the detection pose results and robot might not be able to pick.
Waypoint locations should try to follow the clockwise or counter-clockwise direction within camera scene. The first waypoint can be at the middle(Or anywhere you could remember). Then central top, central top to the right……until the waypoint can form a circle to produce enough poses. Each waypoints should have slightly tilt and rotation. Try to keep tilting degree small, and rotate around the wrists.
For details of Calibration waypoints, you can check out this article.TODO
Warning
Guidance Calibration and Auto Calibration only needs to setup the first waypoint. For Guidance Calibration and Auto Calibration, first waypoint should always be the central location.
This is the sample central waypoint.
Execute the Program
Click Run on both Vision and UR, now you should see the robot moves to different poses, Camera captures and Vision accumulates the data. You just need to sit back and relax, wait for it to be done!
Warning
Even though you can sit back and relax, but remember to MONITOR the robot movement!!! Do NOT hit anything!!!