MULT Factor
You might have already noticed that, robot poses are in double/float format while Vision is integers. This is mainly because of the communication is through a fixed size of socket. The maximum amount of numbers it can fit is limited(You can checkout this article to see the structure of this message and the data types for better understanding). While there are some robots are sending poses in unit of meter. It will remain a long number behind the decimal. To restrict the number in proper length, we multiply the number with a MULT factor.
Message Vision sent:
Position[x,y,z]( 10000 , 20000 , 30000 ), Orientation[rx,ry,rz]( 34715 , 53798 , 56621 ), Orientation(Optional for quaternion)[w]( 0 ), Payload_1( 21 , DAOAI_TYPE_SQUARE ), Payload_2( 22 ), Payload_3( 230000 ), Payload_4 ( 240000 ), Payload_5( 250000 ), Payload_6( 26 ), Status( 20 , DAOAI_OBJECT_FOUND ), meta_1( 99 ), meta_2( 1 )
Message Hercules received:
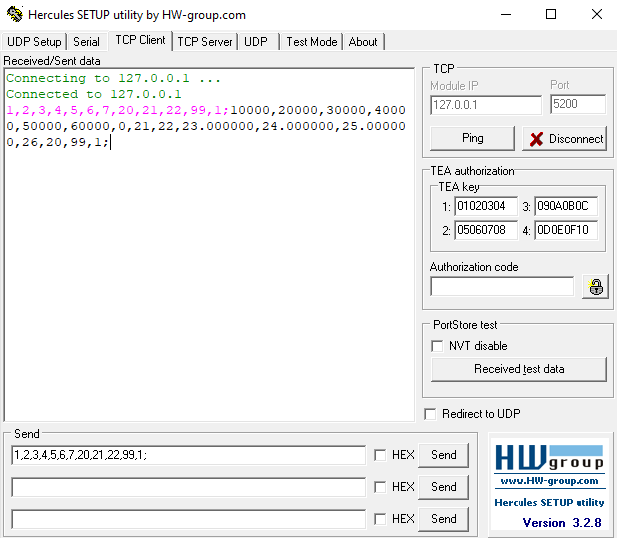
You see from the image above, Hercules receives the pose with values multiply with 10000. This MULT factor only apply to x, y, z coordinates, rx, ry, rz orientation/rotations. The rest of the fields are remain the same(some of them format changed from Integers to Doubles/Floats, but does not change the values).
Some robots have the MULT transformation integrated on Vision side, some do not. All the listed types of robot will have the transformation done by Vision, but if you are using a robot new type of robot, you will need to process the transformation on robot’s script or using an external script to process the transformation.
Check the Values!!!
After all the process with MULT factor, you have to check if the essential data(numbers) were kept. Many robots supports preview of the received poses, which allows you to check the coordinates before the robot perform any movements.
You can check by the following steps:
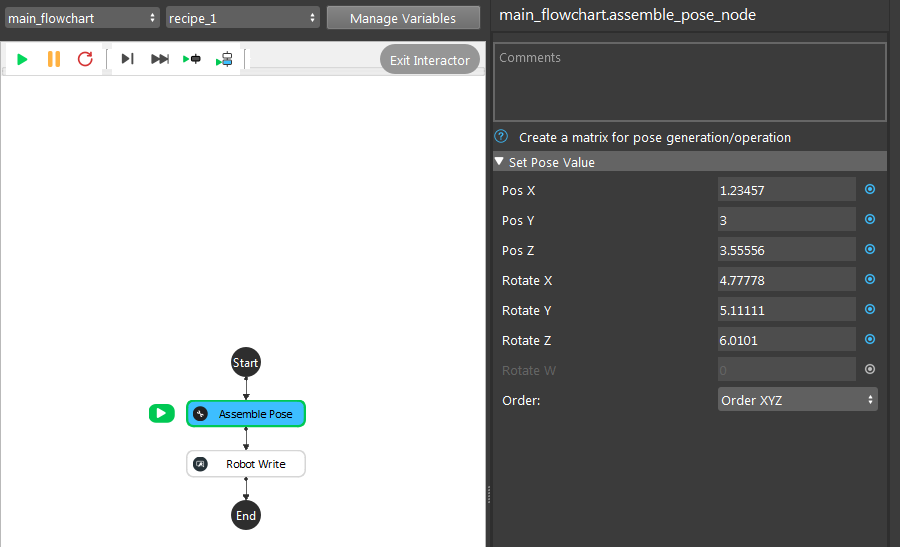
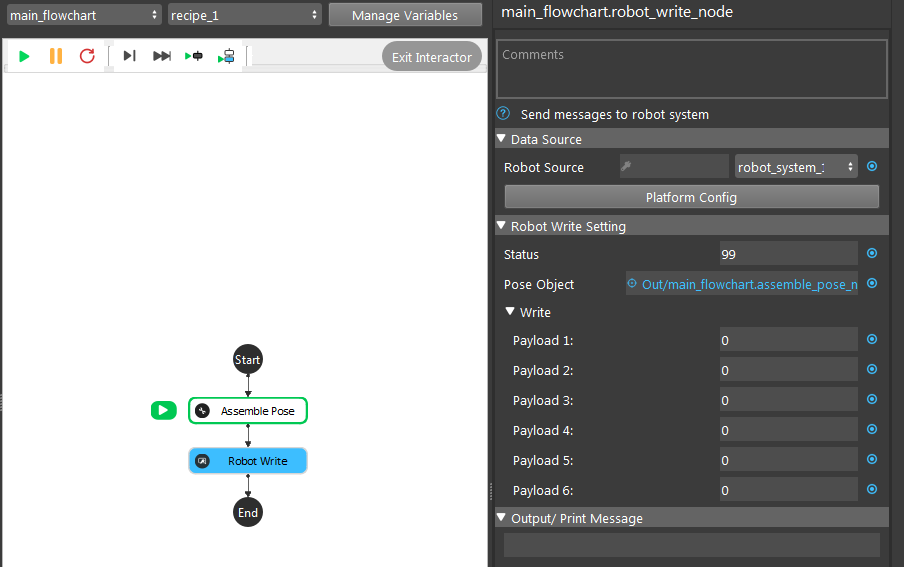
Send a customized double with long numbers after the decimal;
Send the customized pose to Hercules and check how many numbers after the decimal had kept;
You can see the received pose on both Vision side and Hercules side: ensure that the pose sent is matching the pose received.
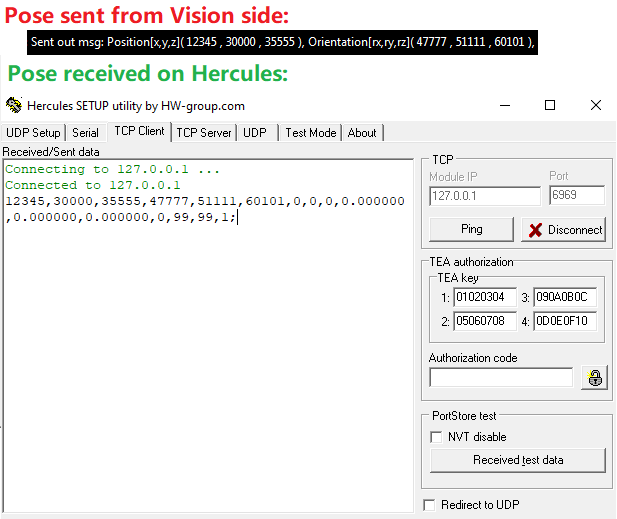
Now that you see the pose Vision sent is exactly the same as the pose Hercules received. Also note that, the pose Vision sent is trimmed down to 4 numbers after decimal, which is MULT factor 10000. In this case, the process after MULT factor is correct and the values of a pose will be kept 4 numbers after the decimal in this type of robot.