Assemble Pose Node
Overview
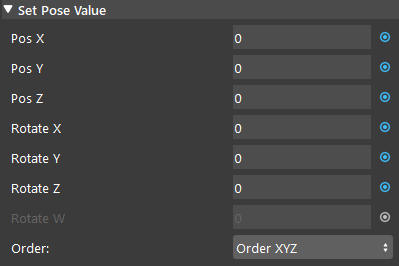
The Assemble Pose node creates a 4x4 homogeneous transformation matrix from 3 translation numbers (in millimeters) and 3-4 rotation numbers (in degrees).
Three main conventions are available for the rotation numbers:
Euler Angles: 3-number representation in the orders: XYZ, XZY, YXZ, YZX, ZXY, ZYX, and ZYZ.
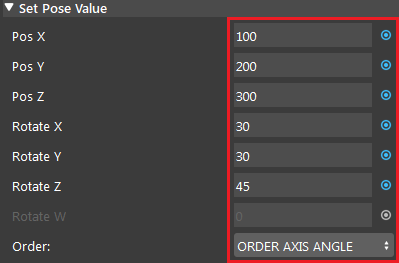
Axis Angle: 3-number representation of axis with angle magnitude.
Quaternion: 4-number representation of a quaternion rotation.
Input and Output
Input (optional) |
Type |
Description |
|---|---|---|
Pos X |
Double |
Generated pose’s translation on X-axis. |
Pos X |
Double |
Generated pose’s translation on Y-axis. |
Pos Y |
Double |
Generated pose’s translation on Z-axis. |
Rotate X |
Double |
Generated pose’s rotation on X-axis. |
Rotate Y |
Double |
Generated pose’s rotation on Y-axis. |
Rotate Z |
Double |
Generated pose’s rotation on Z-axis. |
Rotate W |
Double |
the rotation around the vector (only used for quaternion rotation). |
Order |
Int |
Select from a dropdown list to choose the order of the generated pose.
Orders are: XYZ, XZY, YXZ, YZX, ZXY, ZYX, ZYZ, Axis Angle and Quaternion.
|
Output |
Type |
Description |
|---|---|---|
Pose |
Pose |
A Homogeneous transformation corresponding to the inputs pose |
Procedure to Use
- Right click the node where you want to insert and insert an Assemble Pose node.

- Input the pose value and select the pose order.
Run the node, and you can access this pose as 3D pose for other nodes’ input (eg. transformation Tree Node, Robot Write Node).