连接机器人
打开一个项目后, 在设置一栏下面,点击连接机器人选项栏。
连接真实机器人
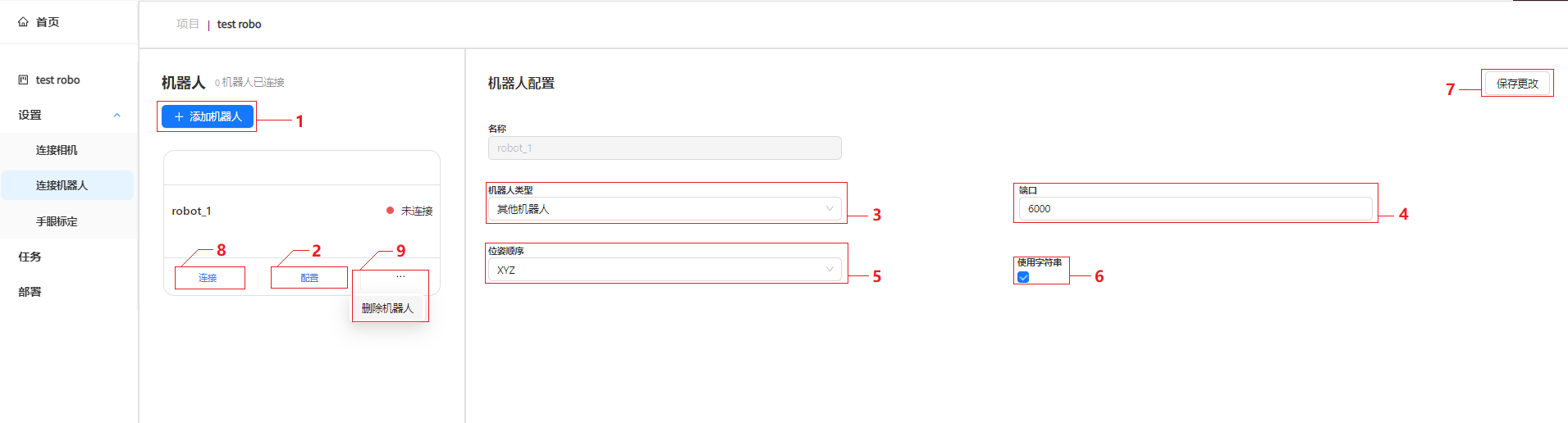
点击添加机器人
点击配置,调出配置页面
选择机器人类型
输入端口号
(机器人类型为其它时) 选择位姿顺序
(机器人类型为其它时) 选择收发格式,勾选后使用字符串收发,不勾选使用字节串收发。
保存更改
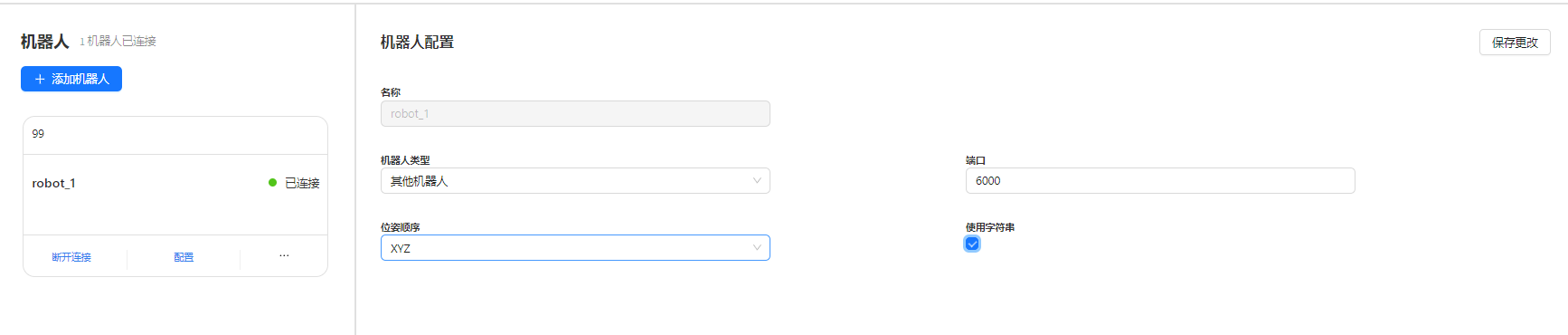
连接机器人
删除机器人
机器人通讯协议详情请查阅 机器人通讯
机器人端以UR机器人为例, 导入DaoAI机器人脚本。
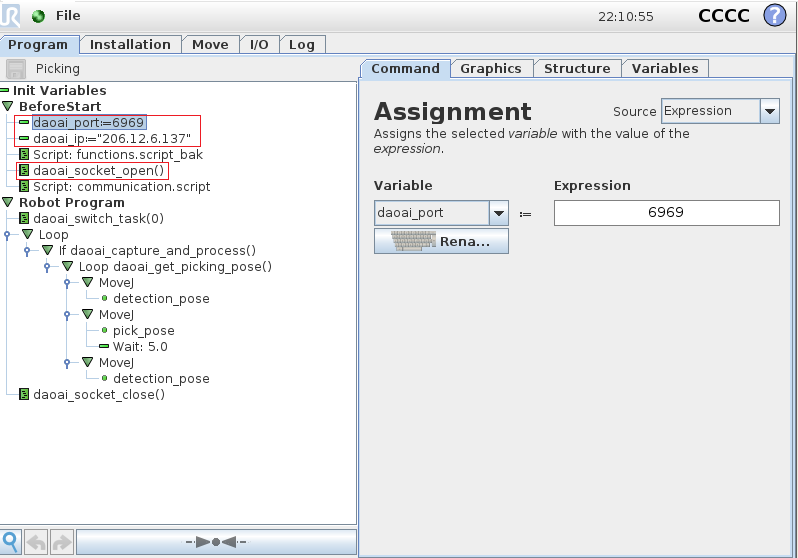
设置变量daoai_ip 为服务器ip。 设置变量daoai_port 为设置的端口。
然后调用daoai_socket_open()函数。
在运行UR机器人脚本后,可以连接机器人到DaoAI Vision Pilot了。
连接虚拟机器人
使用Hercules为例,连接虚拟机器人到DaoAI Vision Pilot。
在连接机器人一栏,选择机器人类型为 其他机器人, 端口 以6000为例。
选择使用的旋转顺序。
选择收发格式,勾选使用字符串,不勾选时会使用字节串。更多请查阅 机器人通讯
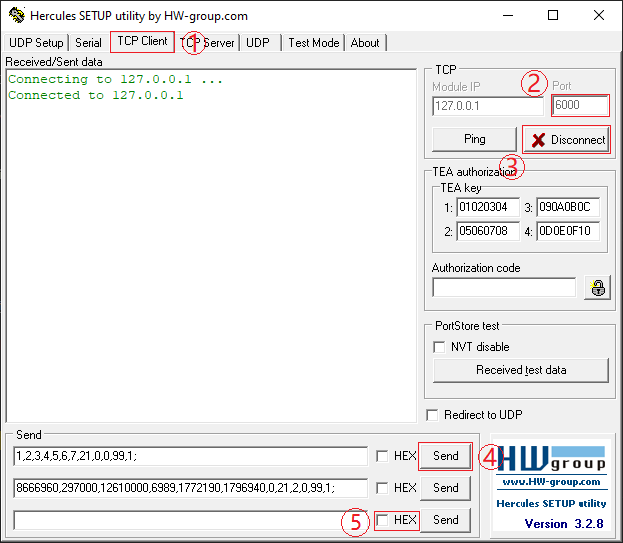
在Hercules界面