软件应用
创建项目
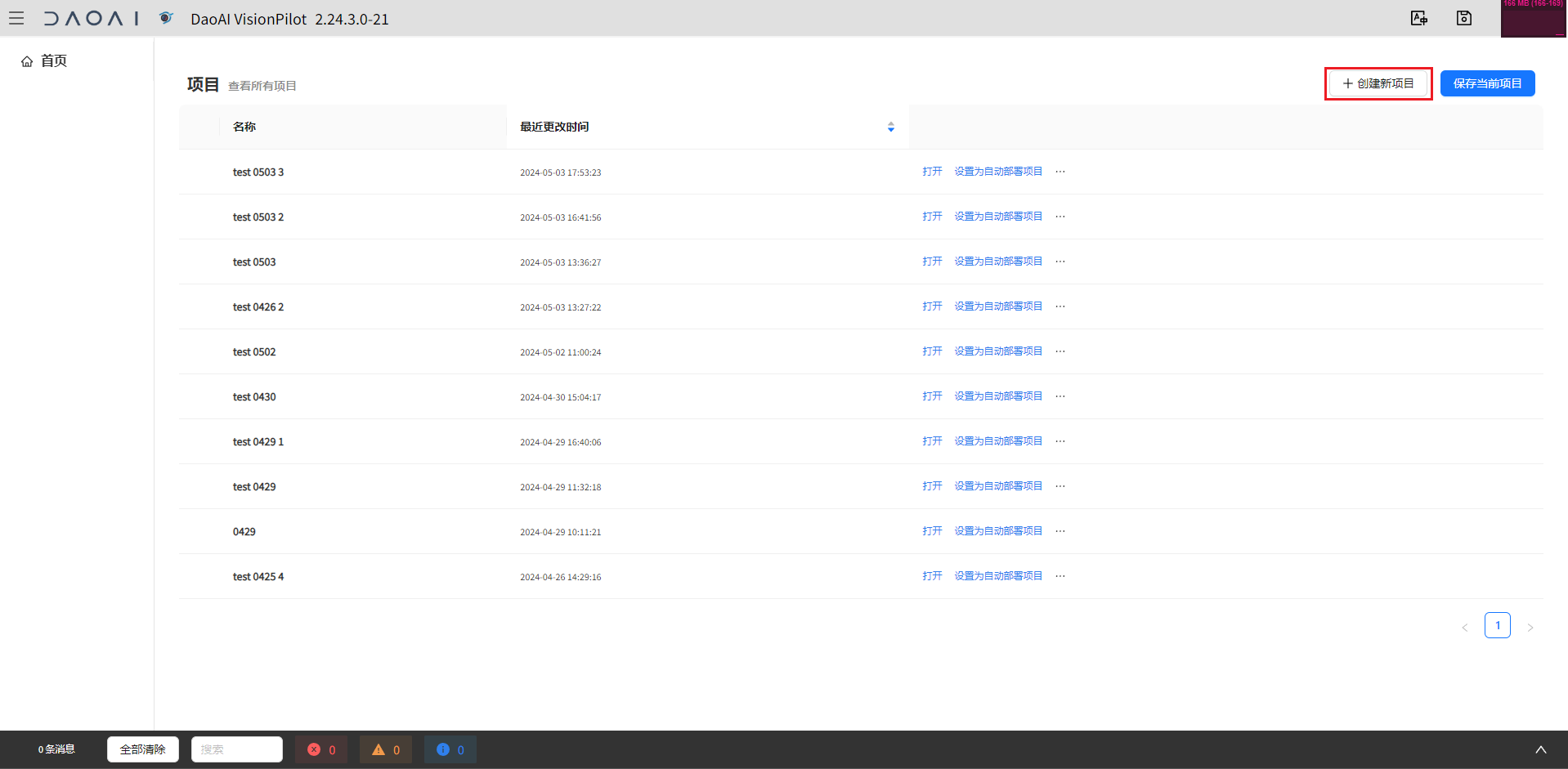
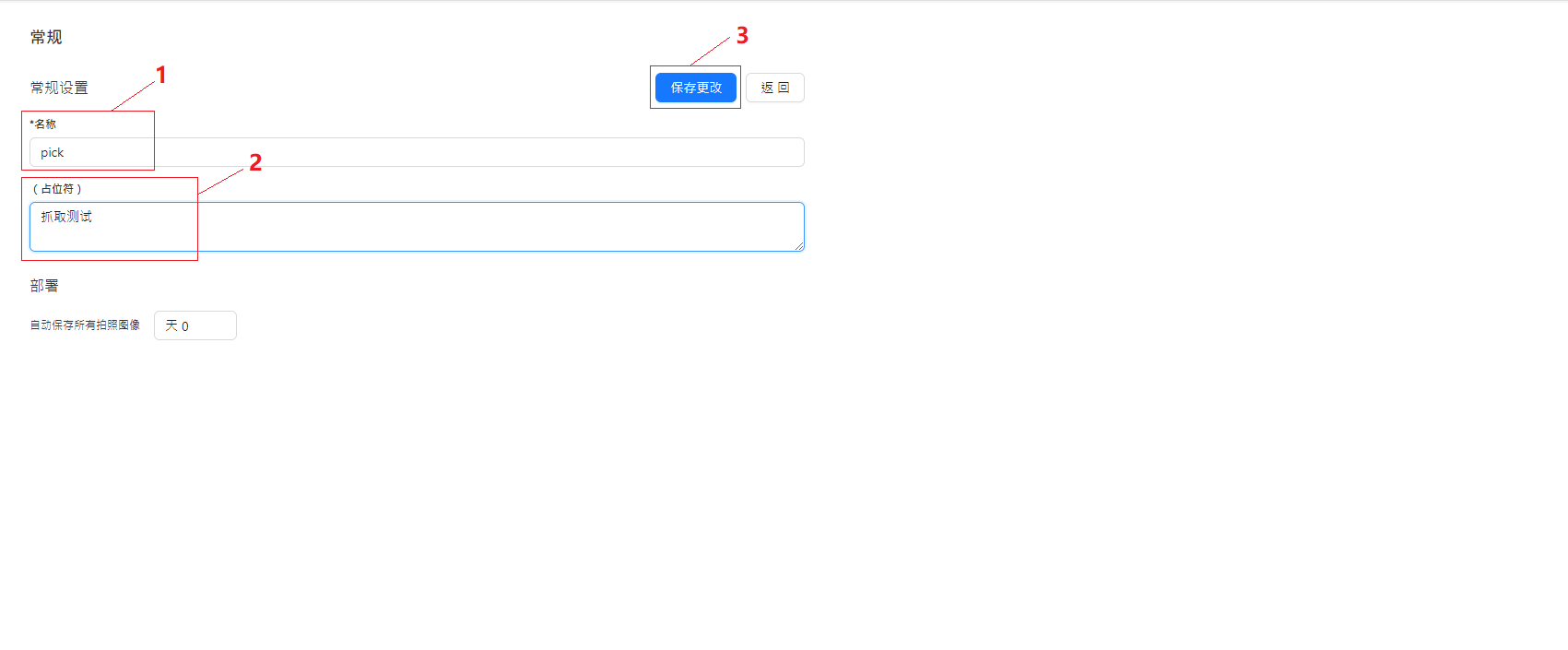
点击“创建新项目”
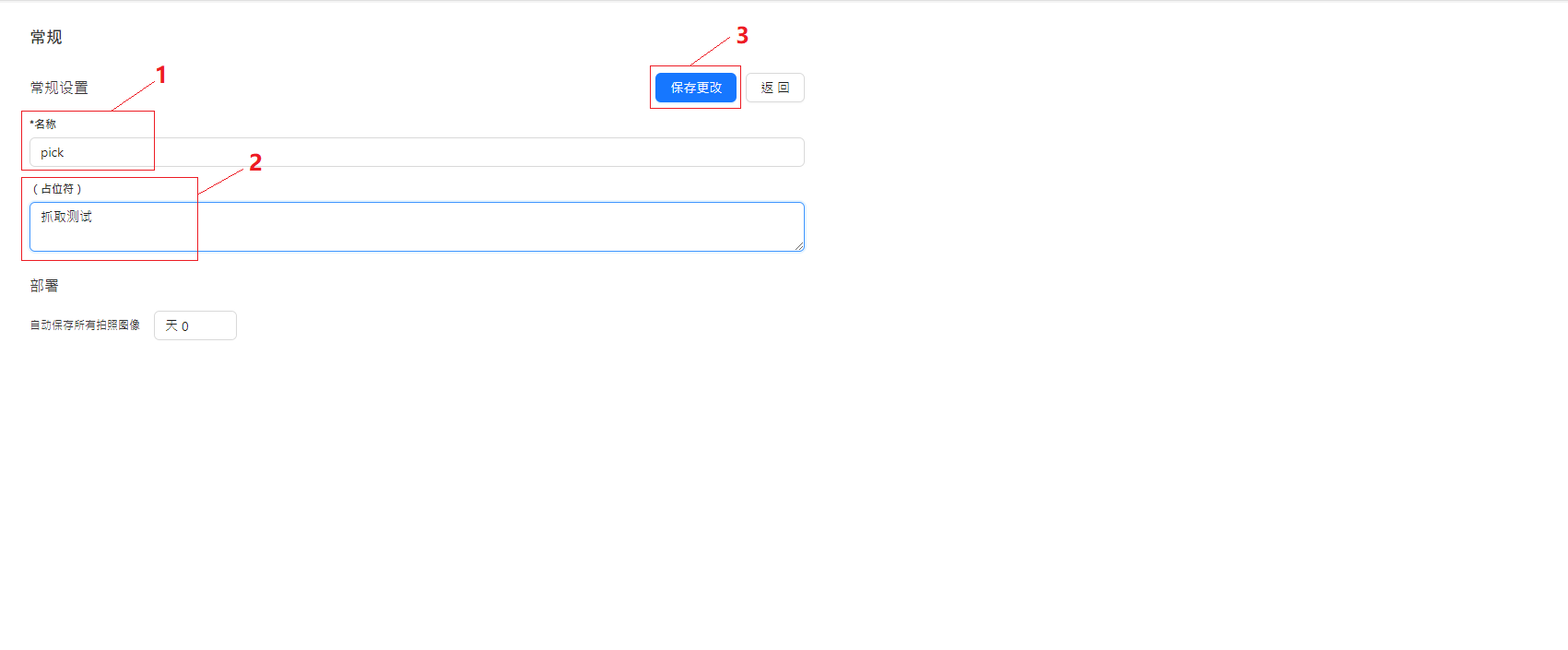
在下图所示“1”处写入项目名称,“2”处写入项目备注说明,“3”点击“保存更改”
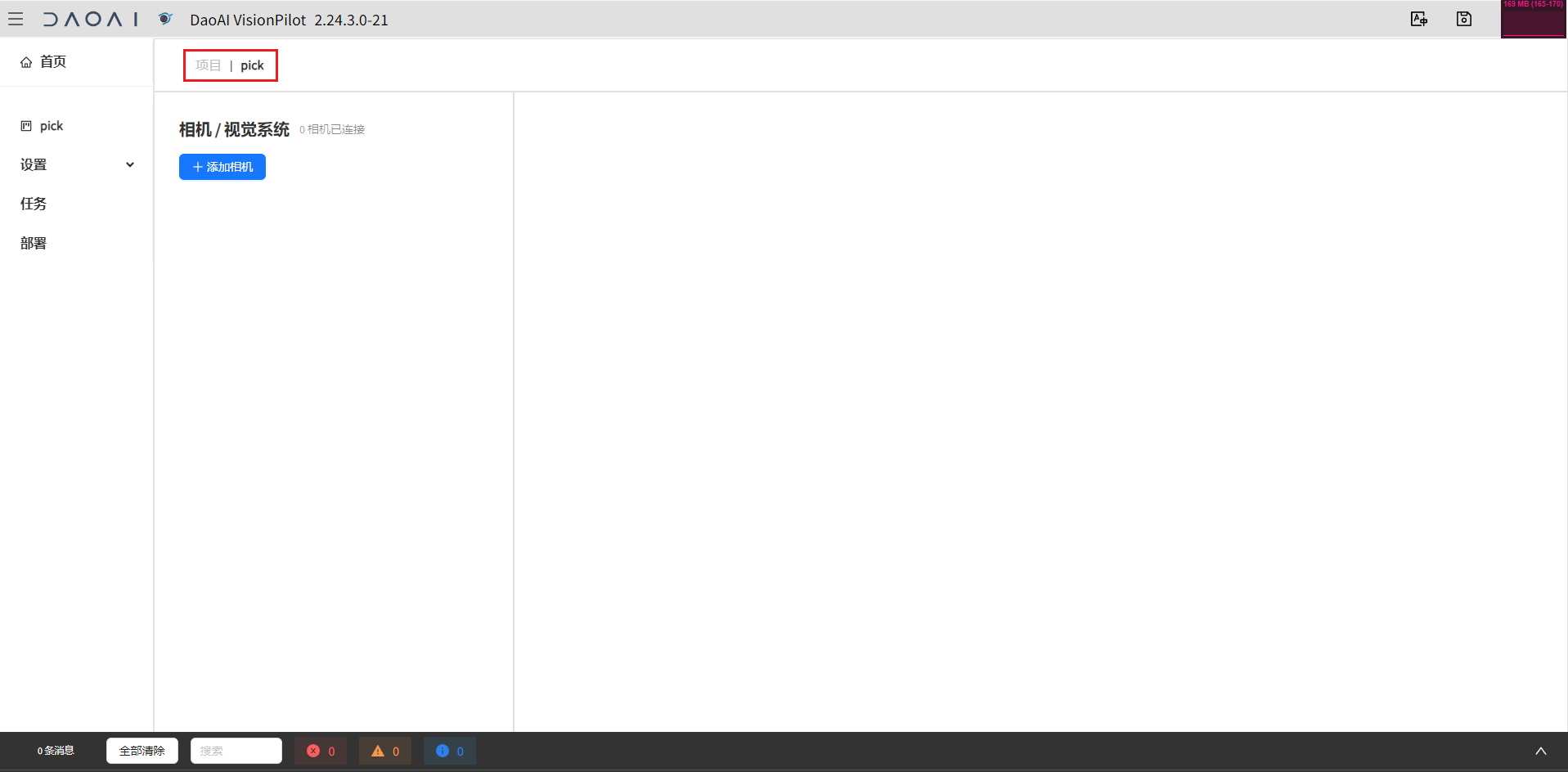
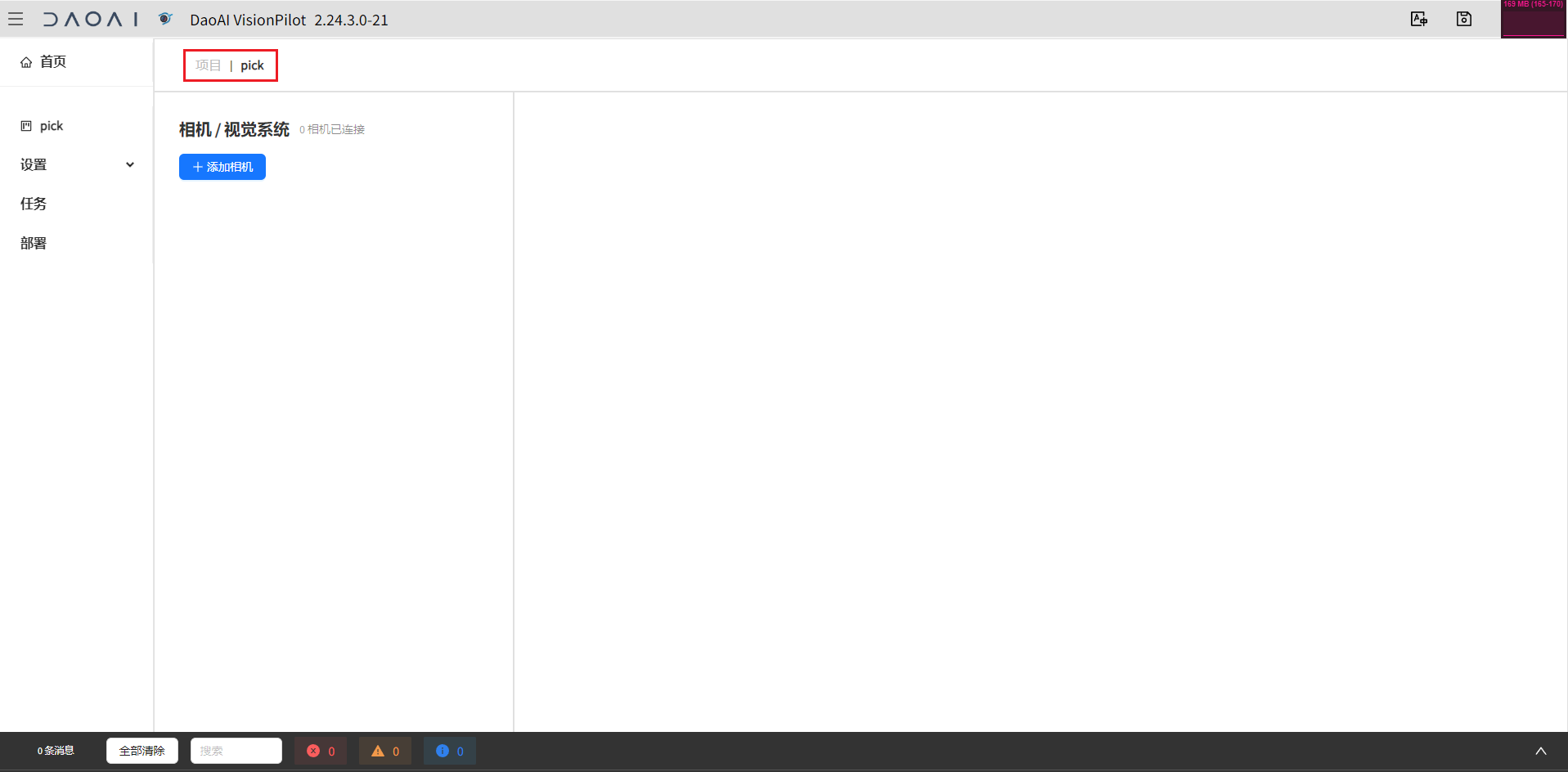
如下图所示、该项目就创建完成了
删除项目
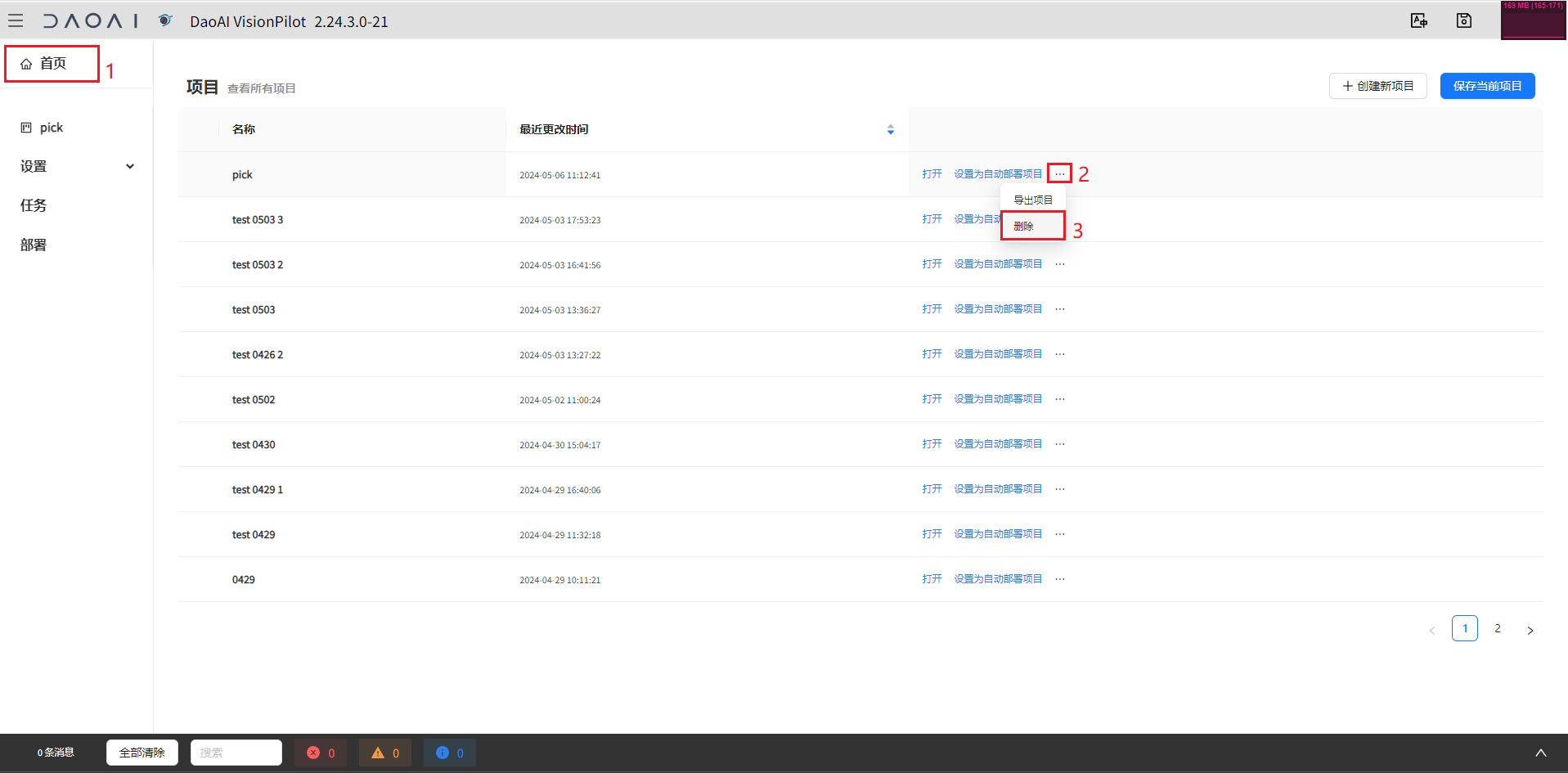
- 如下图所示:
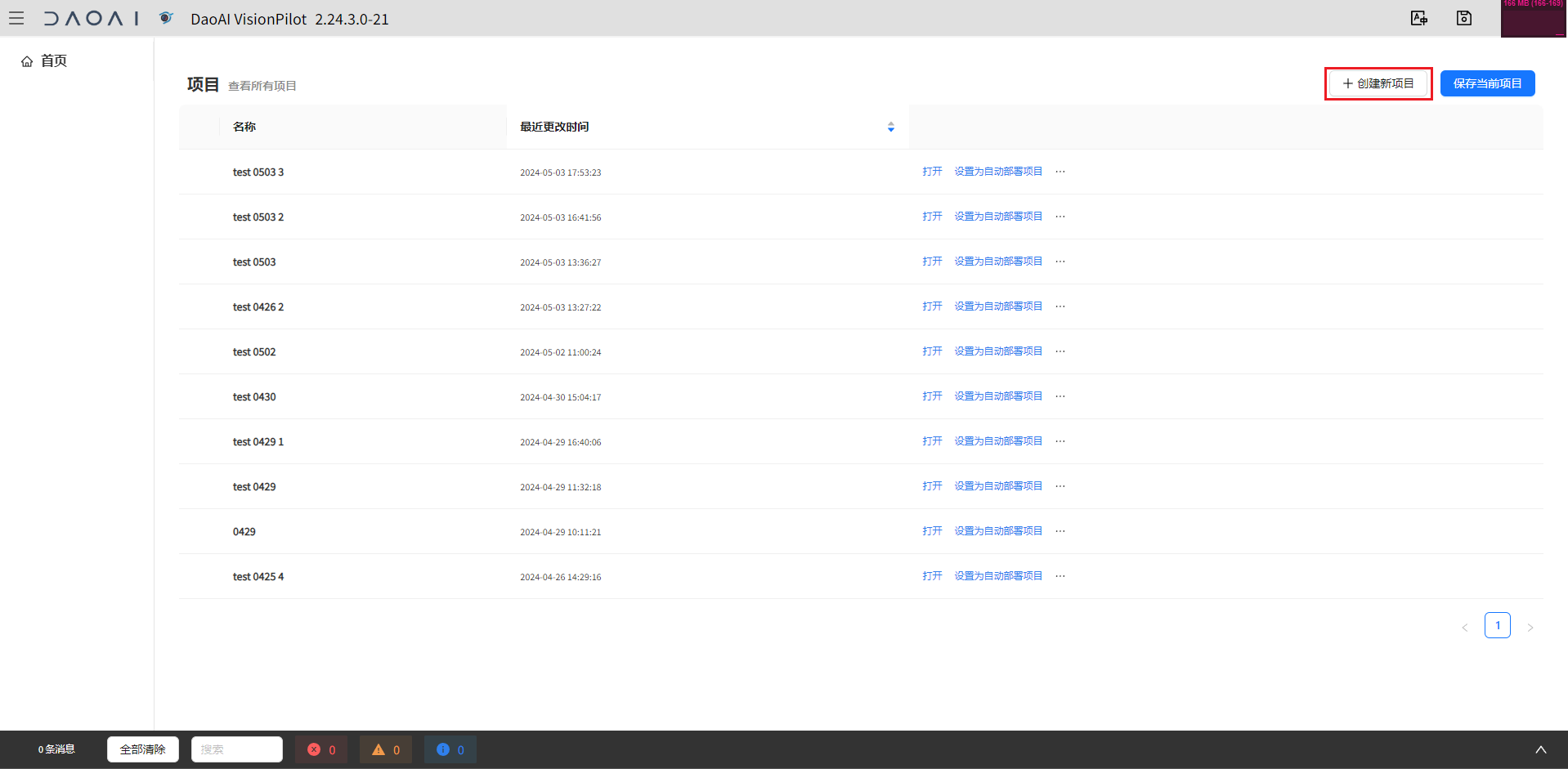
点击回到主页
点击项目更多菜单 ‘···’
点击删除,确认后即可删除项目
导出项目
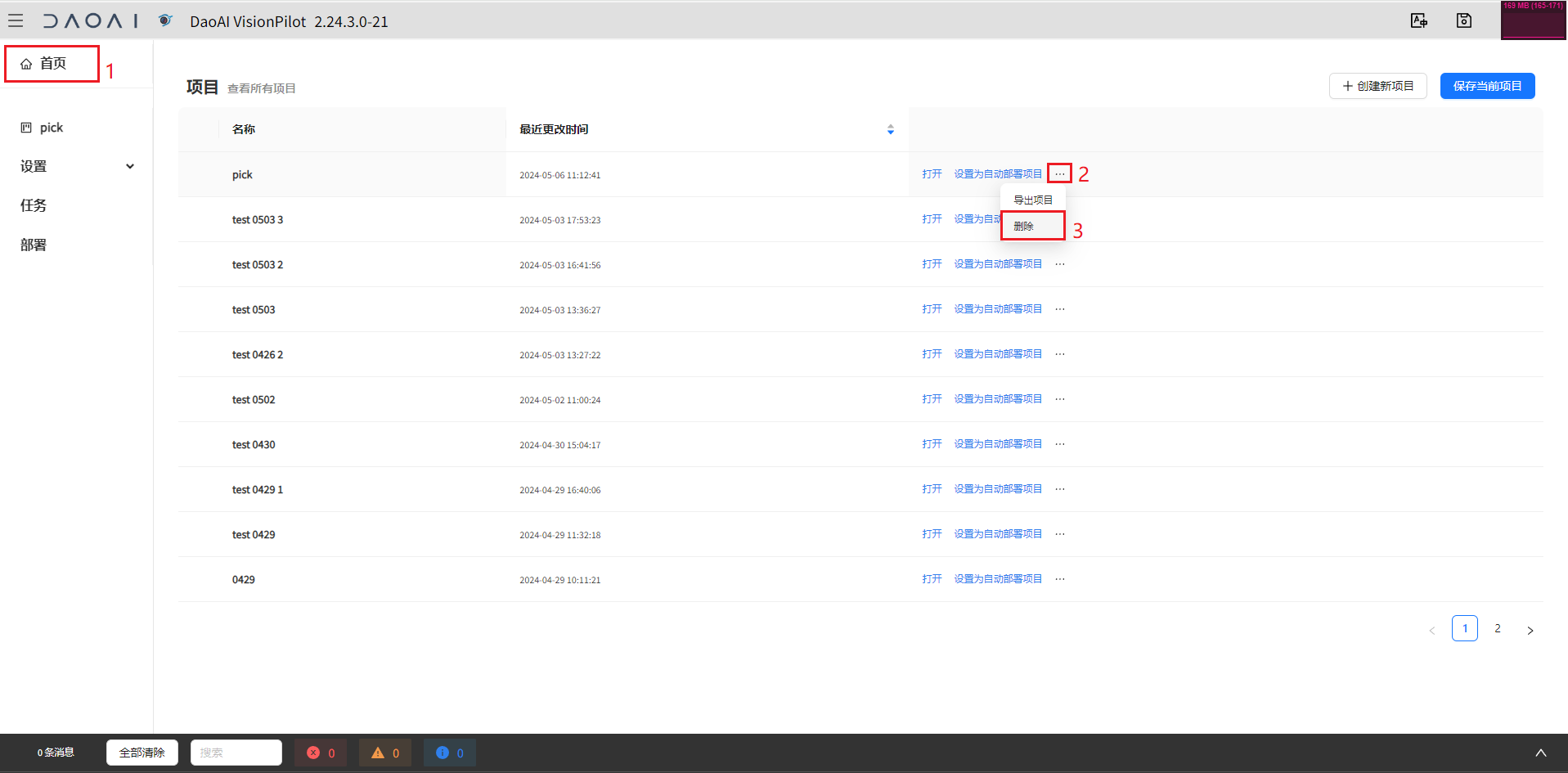
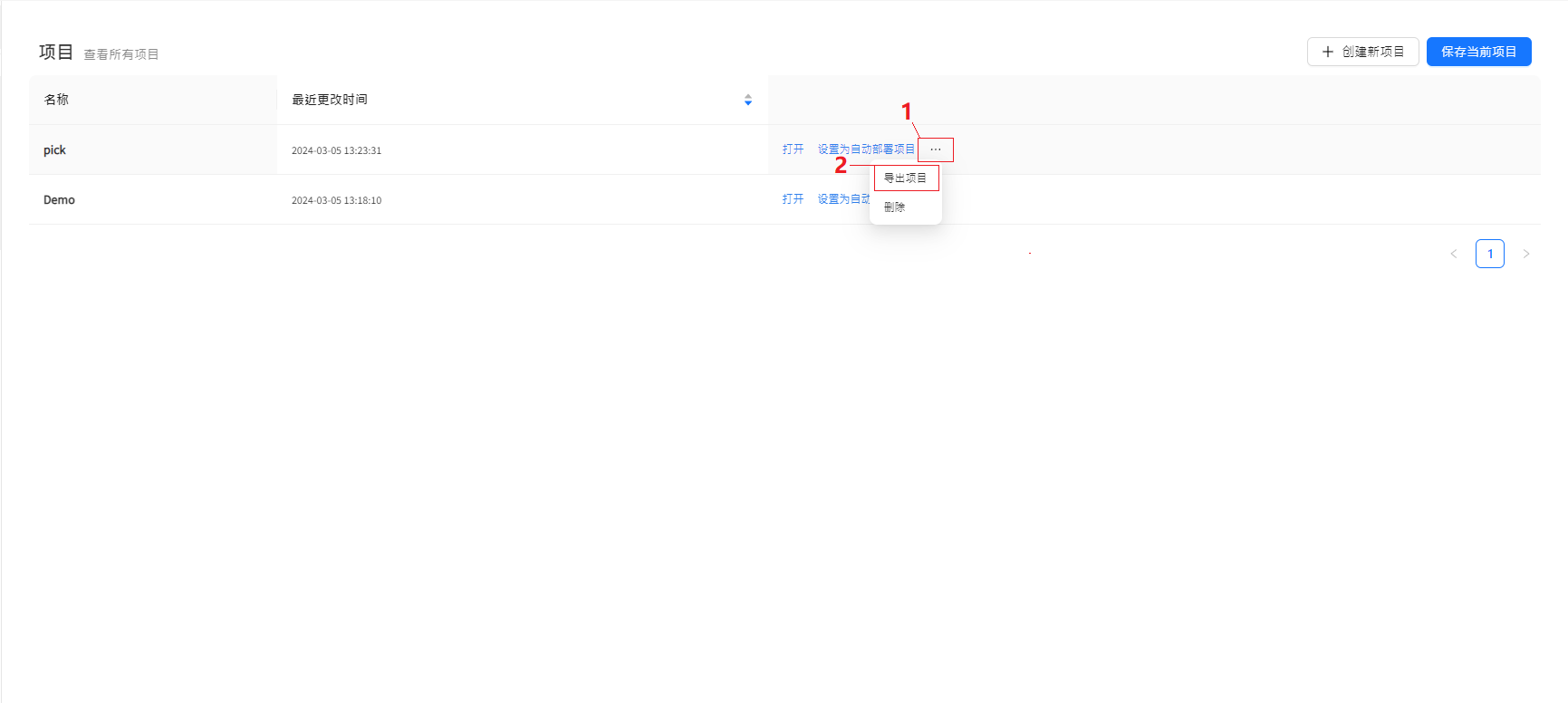
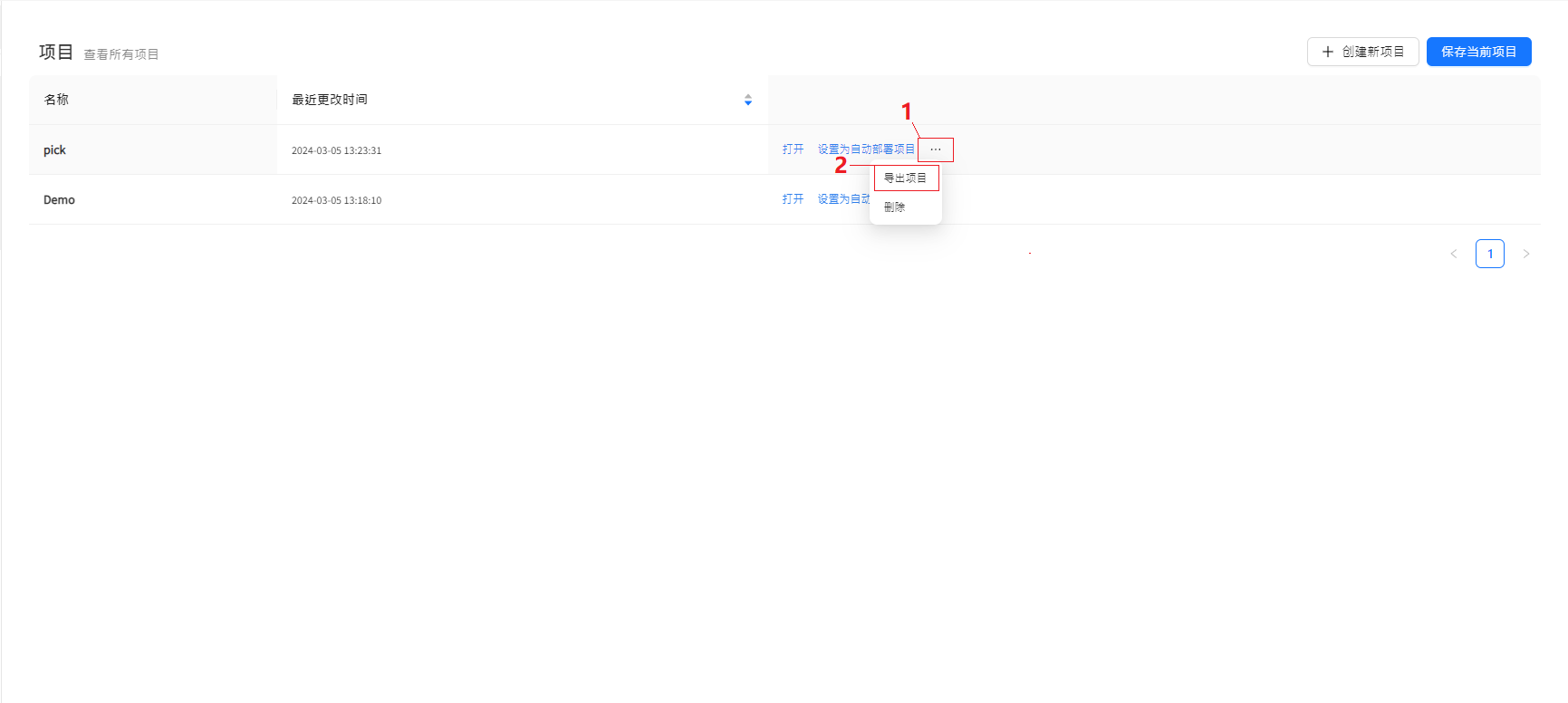
点击“1”处“…”,选择“2”处“导出项目”
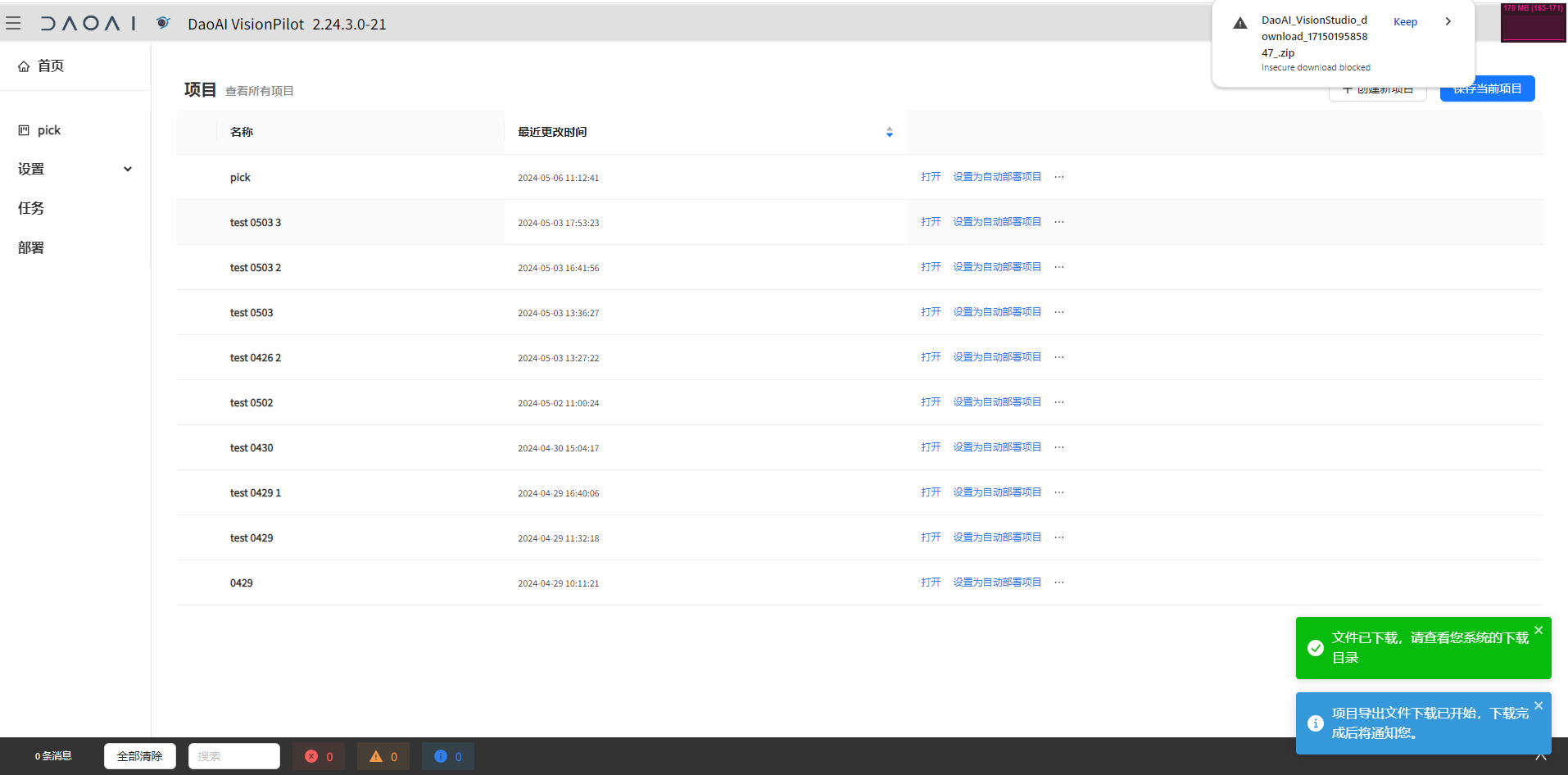
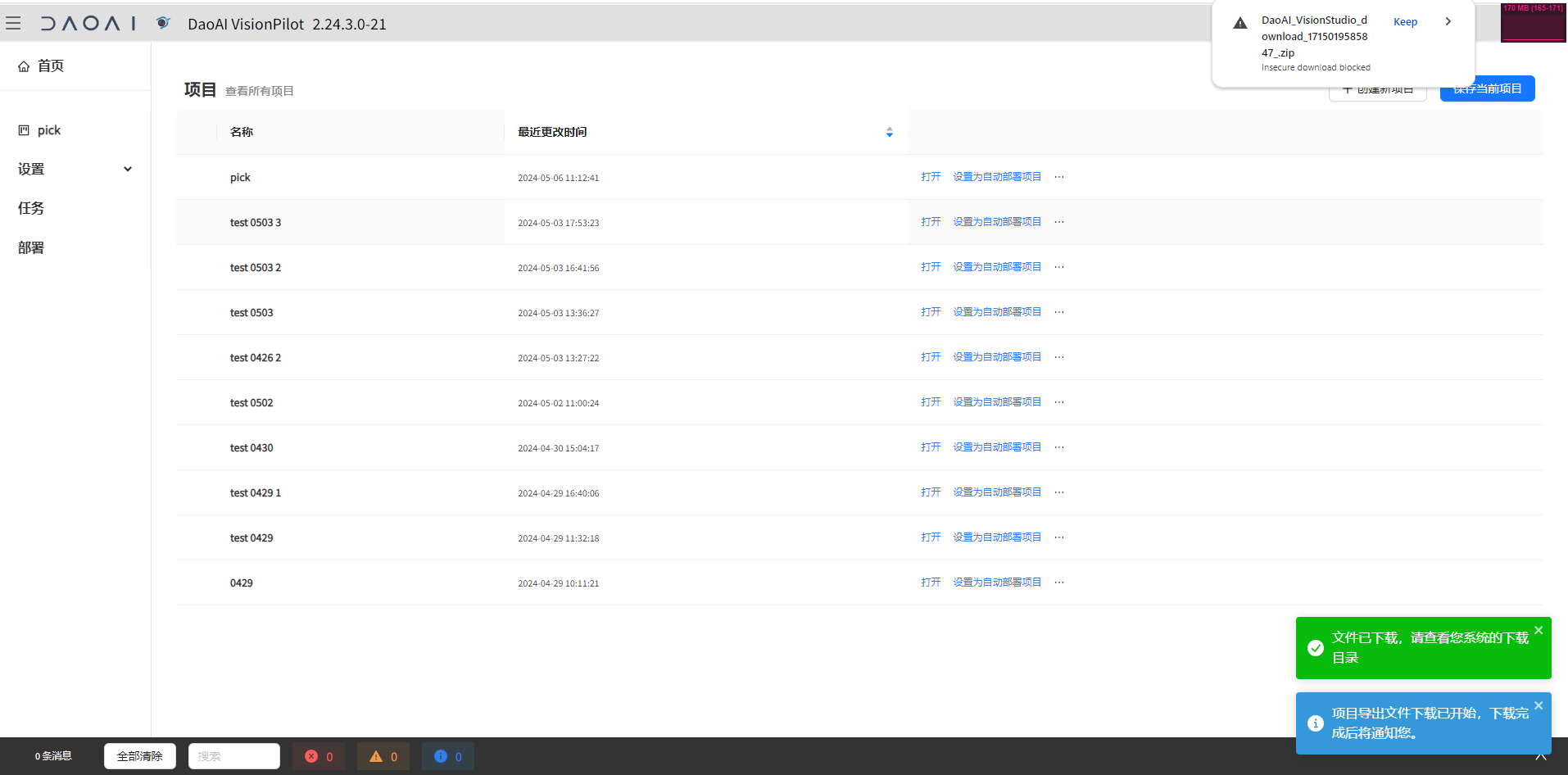
可以看到该项目文件已开始下载、文件已下载、下载完成后可以在浏览器“下载”路径中找到。
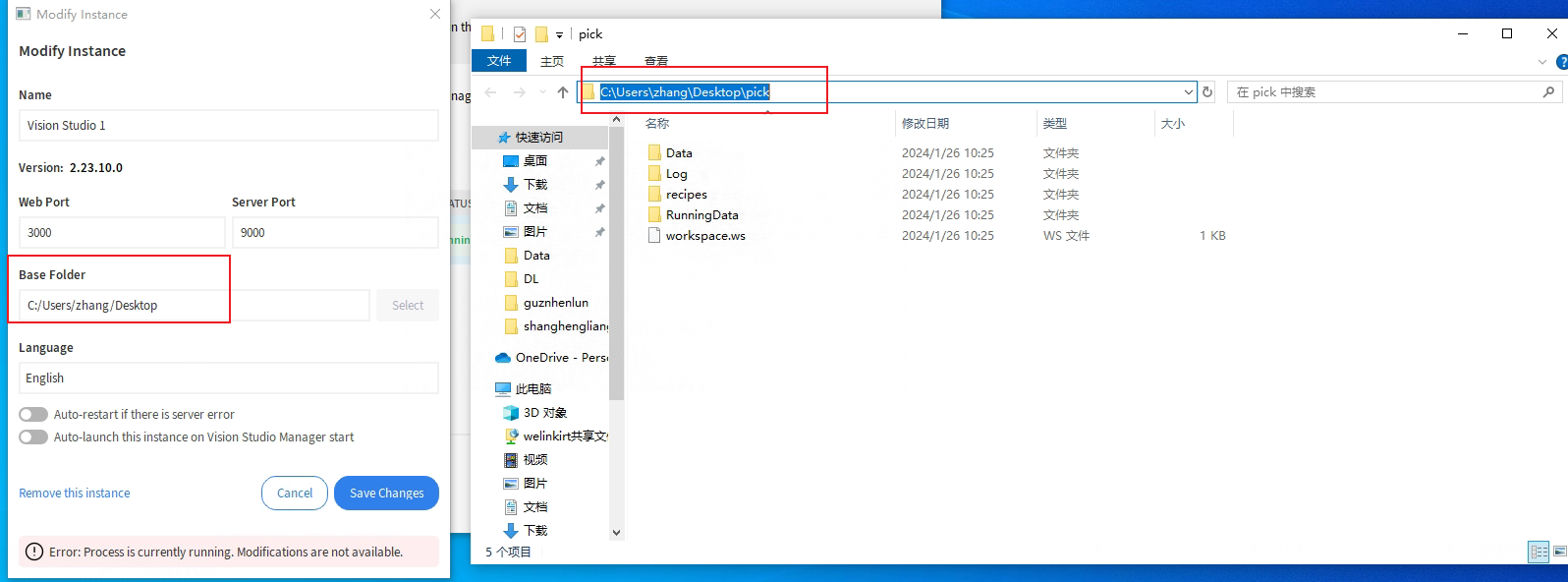
导入项目
备注
如果您已有项目的工作空间、想通过服务器实例打开、查看或配置该项目的工作空间
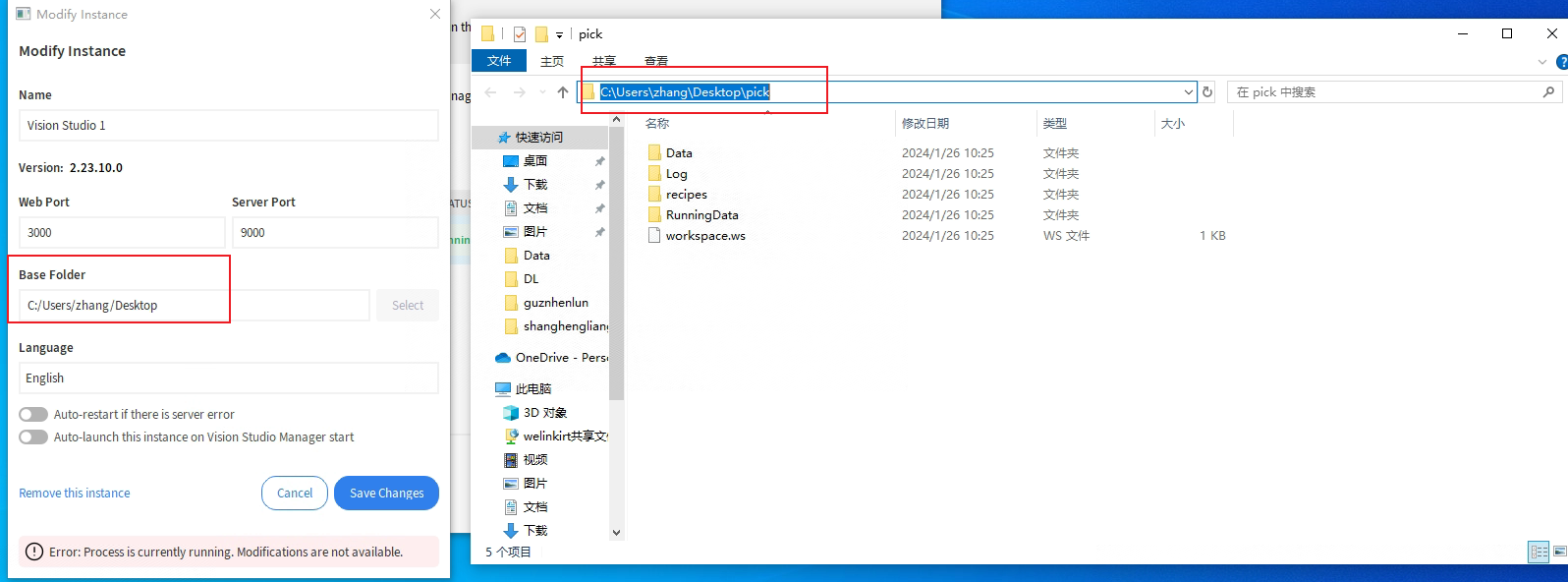
这样我们就可以在该服务器实例中看到我们需要打开、查看或配置的工作空间了
项目开机自启
如果您配置好了一个项目,想要长期部署,那么开机自启该项目可能会让部署更方便。
开机部署可以在开机后,自动运行服务器实例管理器,然后启动设置自启的实例,并部署设置自启的项目。
开机自启的配置分为两部分:
1. 服务器实例自启
- 勾选服务器实例开机自启,勾选后,当电脑开机后,服务器实例管理器会自动启动,并且该实例会自动启动并打开网页。
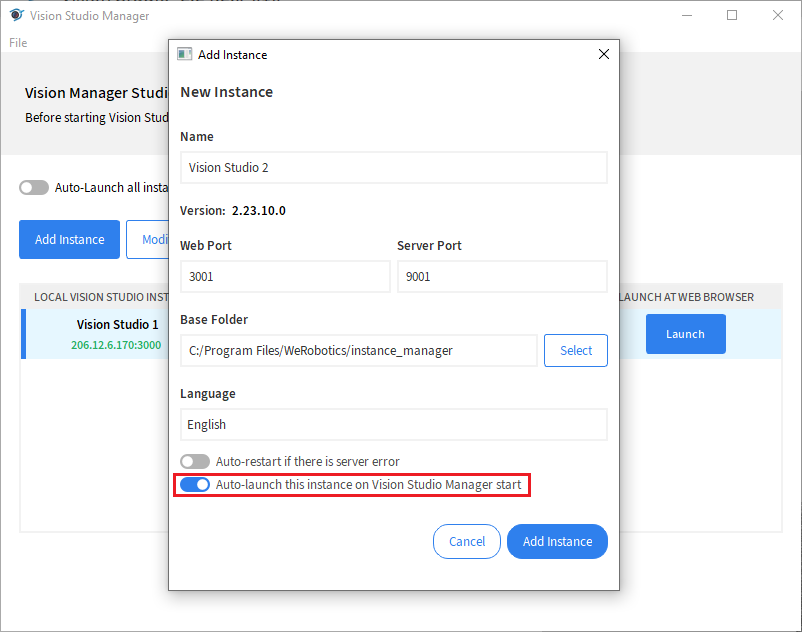
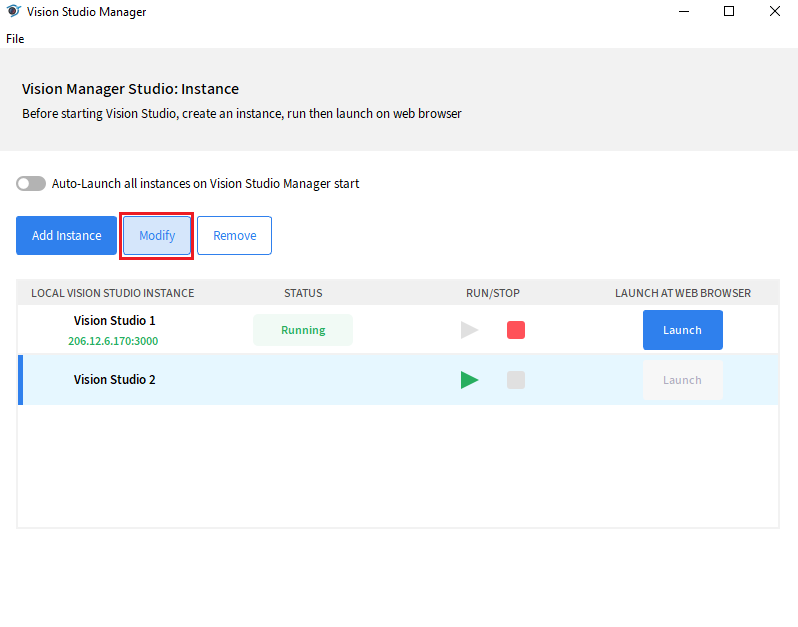
- 想要取消时,选中一个服务器实例,然后点击 Modify,取消勾选服务器开机自启选项即可。
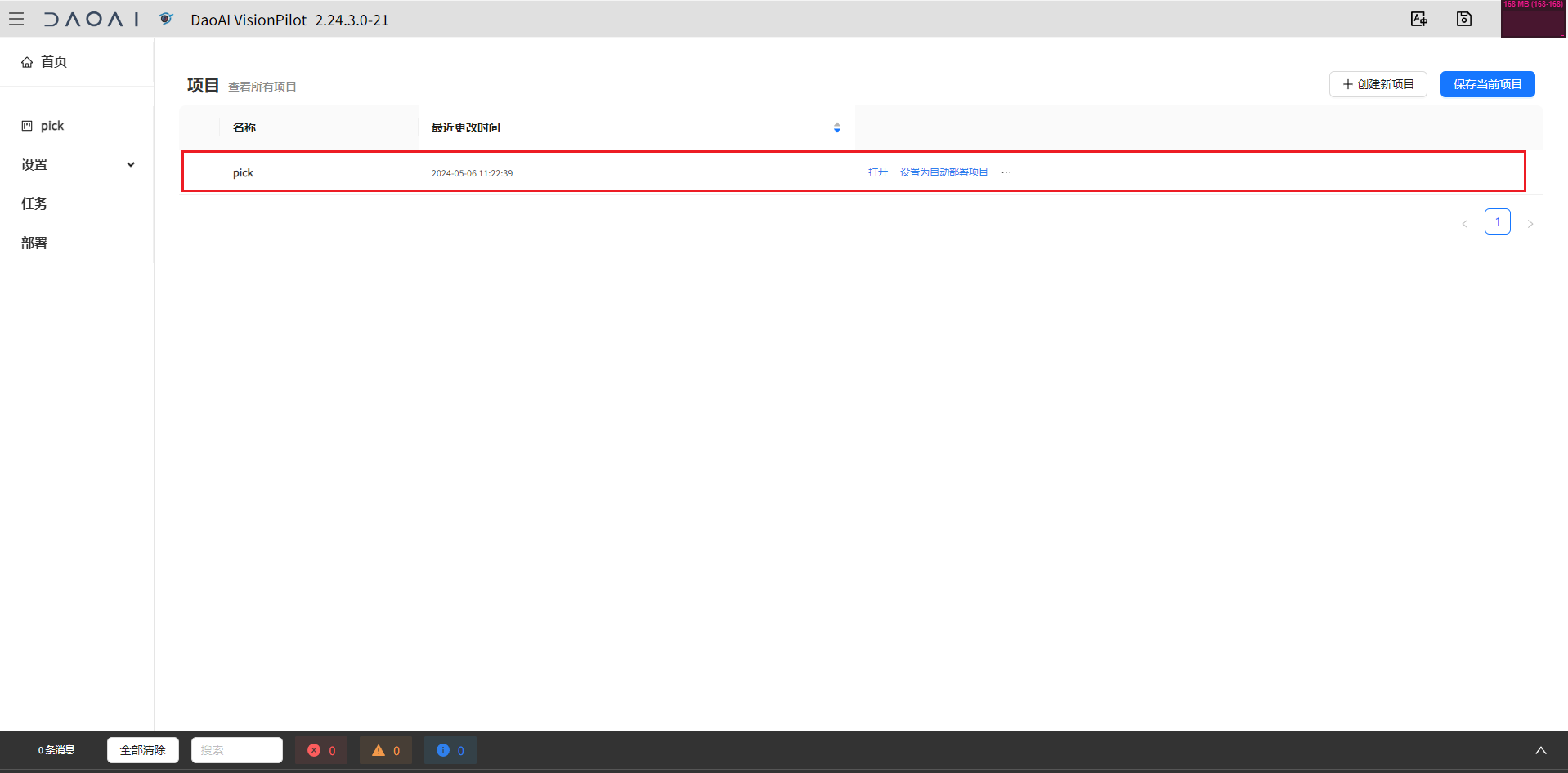
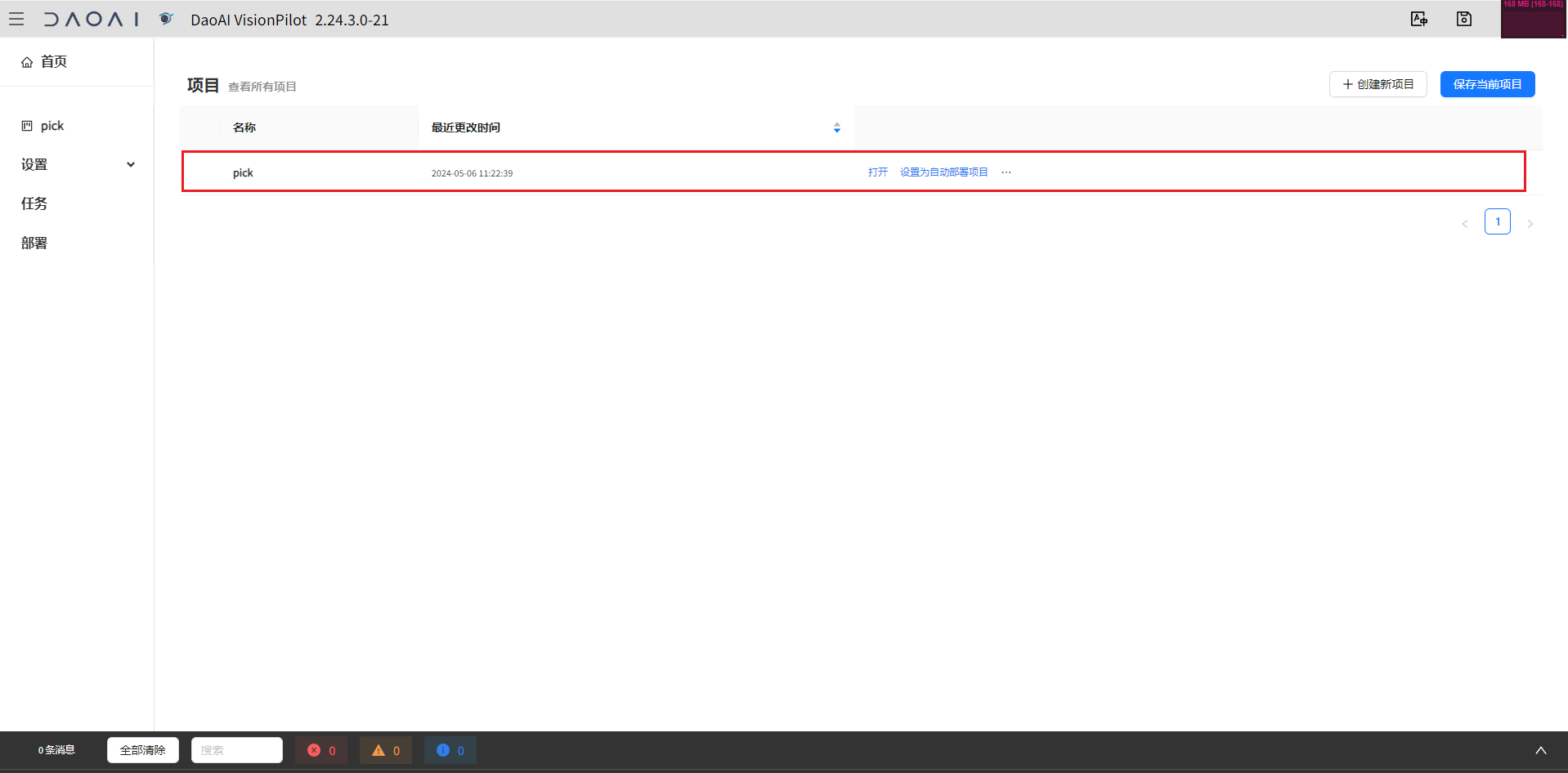
2. 视觉项目自启
- 在项目页面中,在项目栏右侧,点击设置为自动部署项目,自动部署项目栏的左侧开头会有自动启动图标。
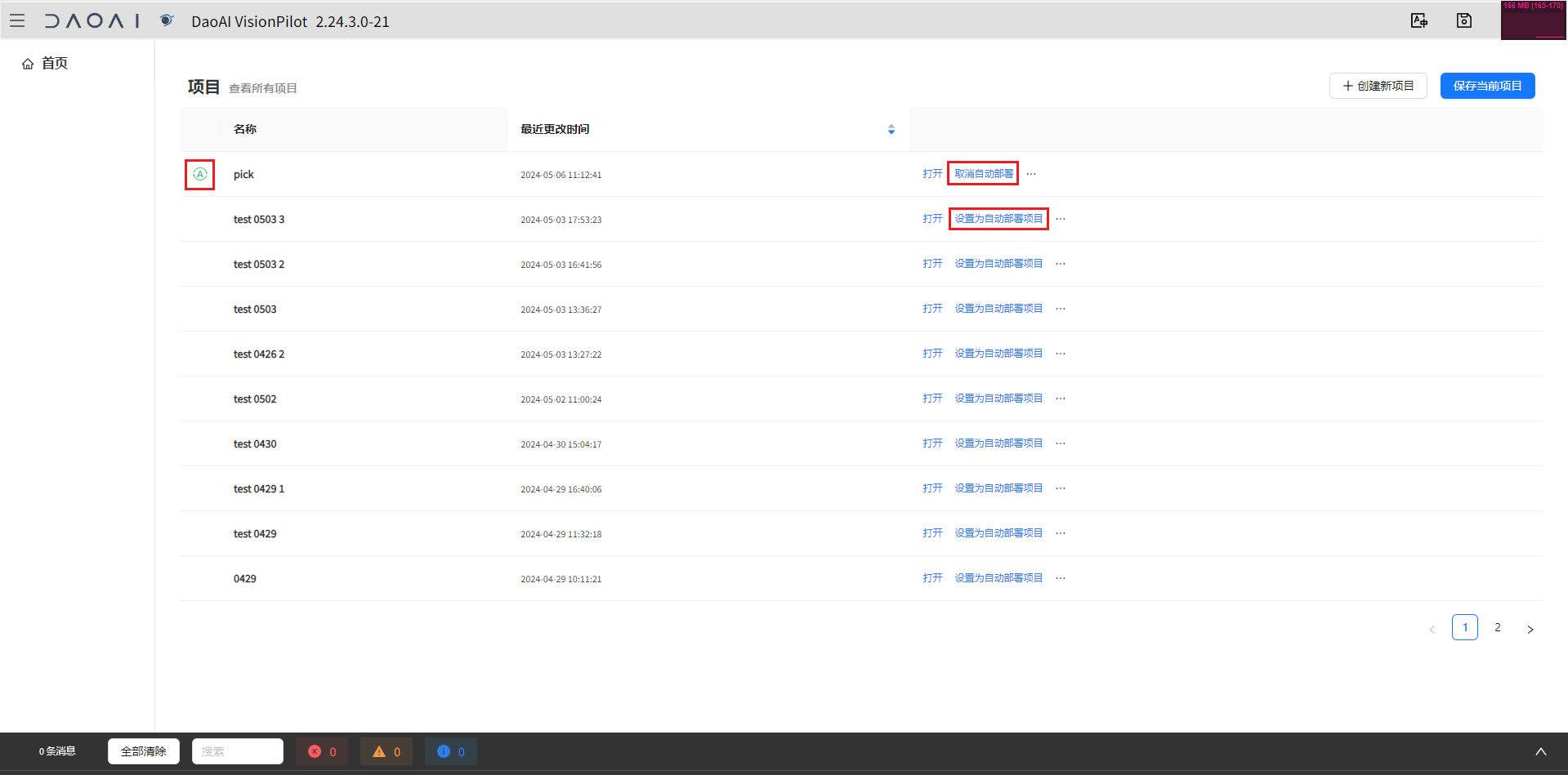
自动部署项目会在服务器实例启动时,自动打开并连接相机,机器人,并部署。
备注
在开机自启时,会即刻部署项目,这就需要连接相机。 连接相机时 系统会处于未响应状态,从而显示从服务器断开。这是正常的,请等待1-3分钟直到相机连接成功或者失败。 如果开机自启等待过于久,请检查相机是否正确连接,供电是否正常。
想要取消时,点击取消自动部署即可。
抓取应用
备注
创建或使用应用需要先连接机器人和DaoAI 3D相机,并完成手眼标定。
抓取应用主要针对抓取场景中的物体。如果您想让机器人抓取某样物体,那么抓取流程可以帮您完成这个任务。
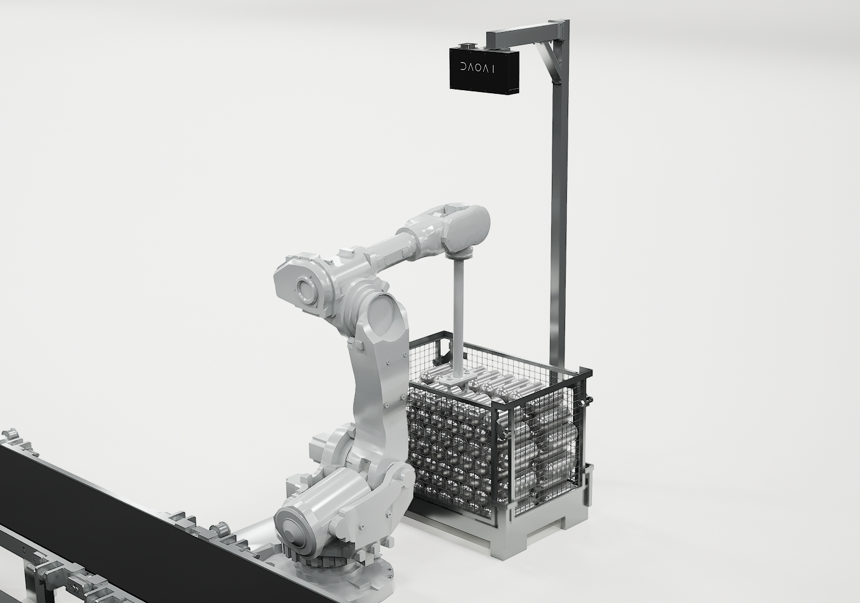
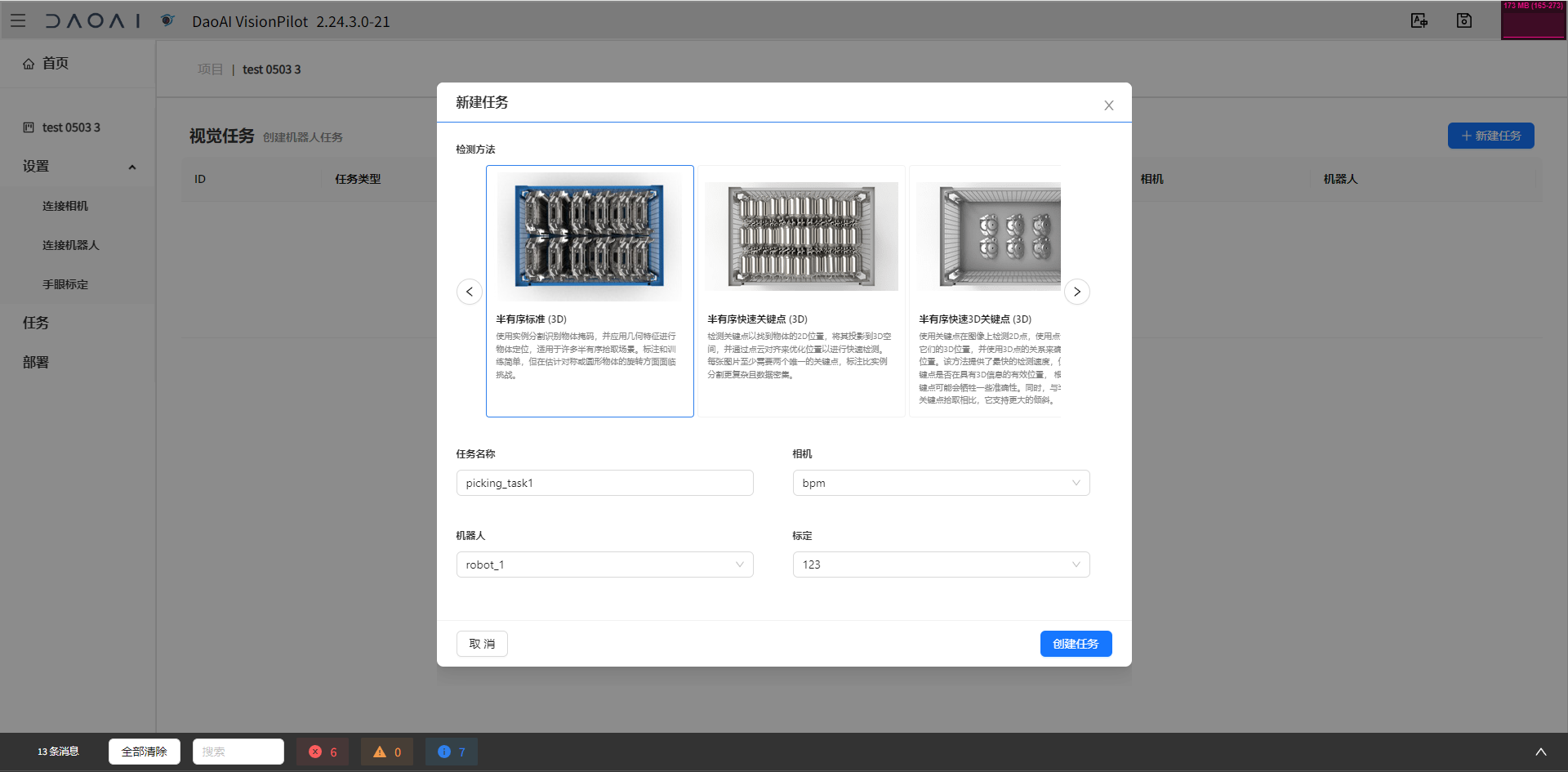
您需要先在DaoAI Vision Pilot中选择抓取任务,并再选择一个检测流程,设置针对该物体的检测流程和抓取策略。了解更多的检测流程请查阅 视觉任务
在设置好抓取任务后,运行项目。
机器人端发送检测请求, 然后再发送抓取点位请求。更多机器人可用的函数请查阅 接口/Interface
视觉回复请求,返回抓取点位,机器人移动至抓取点位进行抓取。