UR 机器人连接
下载UR机器人脚本, 将机器人脚本放置在一个空的USB drive里面USB drive.
复制一个 urmagic_upload_programs.sh 到usb的根目录,这个脚本文件会上传UR脚本到UR机器人里面。

备注
如果想要备份UR中的文件,可以将 urmagic_backup_programs.sh 复制到一个空的USB里面
将准备好的USB插入UR操作板,插入后显示窗口会弹出红色的USB字样,等待绿色的USB字样弹出后,即可拔出USB。如果您没有看到绿色的USB字样,请等待10分钟后再拔出USB。

点击 Program Robot, 然后选择 Load Program.
选择任意脚本。这里以抓取脚本为例。如果您还没有Initialize Robot那么请在这一步做。
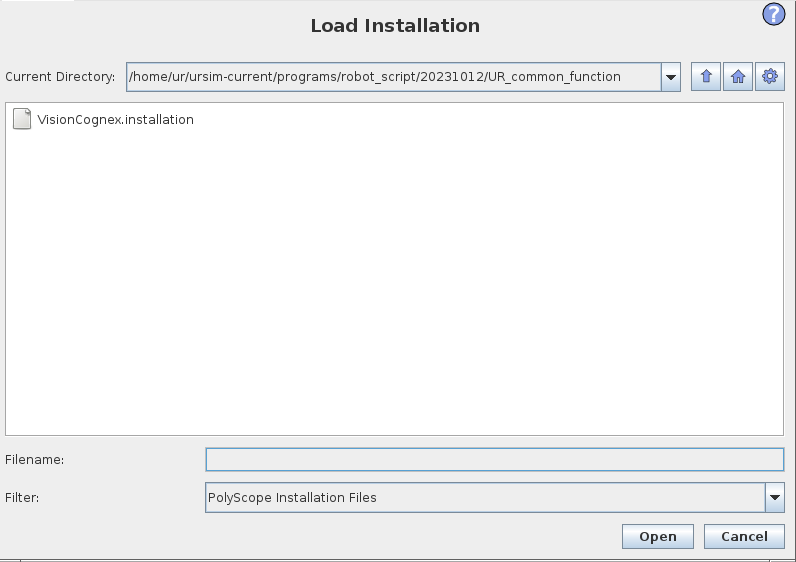
点击 Load Intallation, 然后选择UR脚本中 UR_Common_function 目录下的 VisionCognex.installation 文件
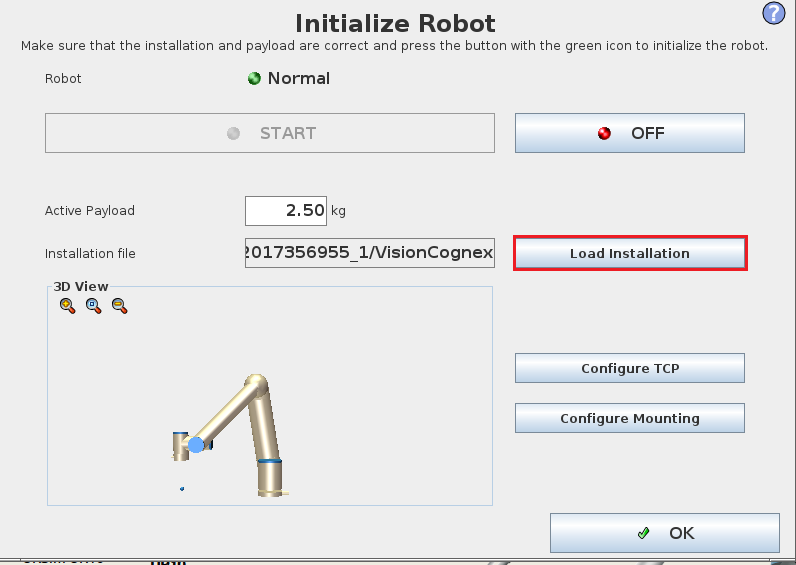
选择合适的Active Payload,然后启动机器人。推荐第一次使用时法兰上不要装任何东西,并选择Active Payload为0。

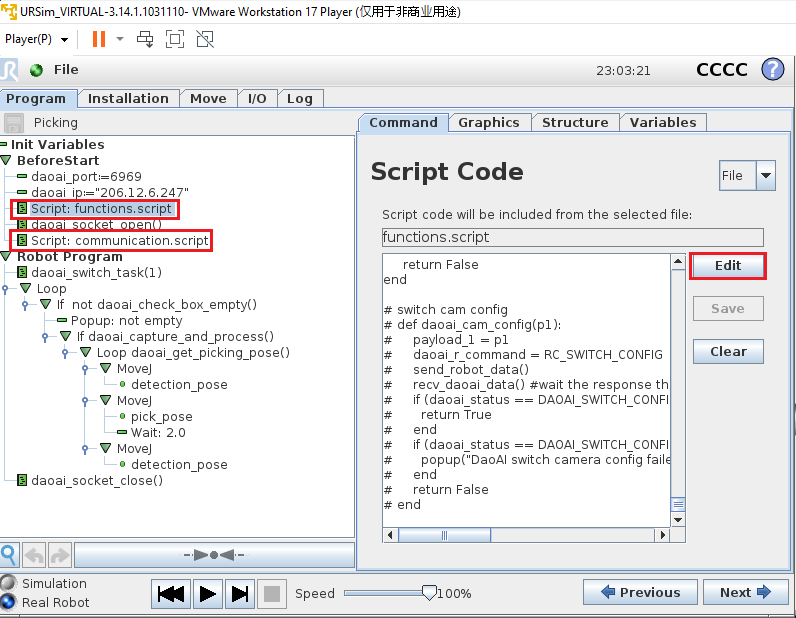
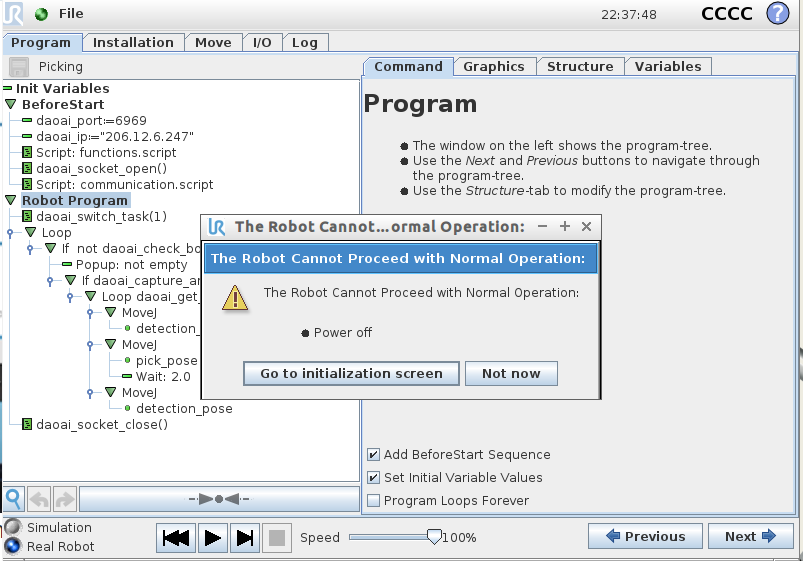
如图所示,需要手动设定好启动了DaoAI Vision Pilot的电脑的IP地址,以及配置的机器人端口号。点击下面的绿色运行按钮,运行脚本时,daoai_socket_open()函数就会连接机器人到DaoAI Vision Pilot。
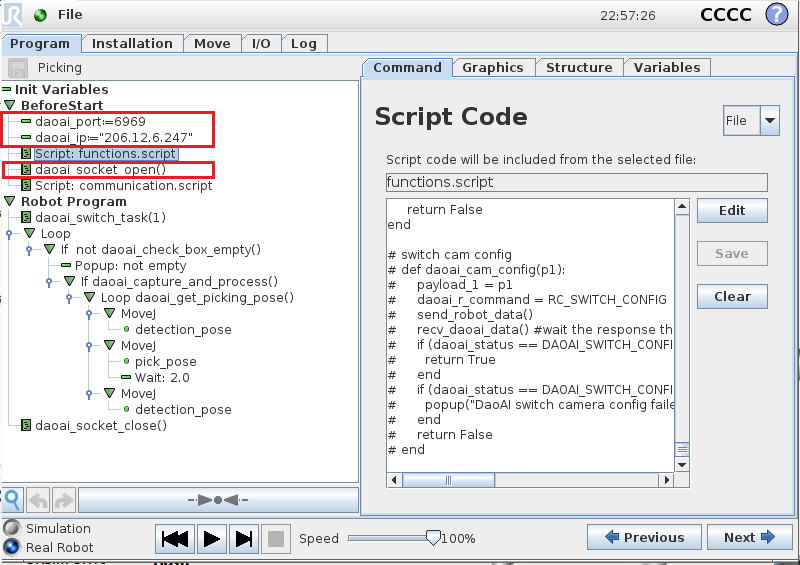
备注
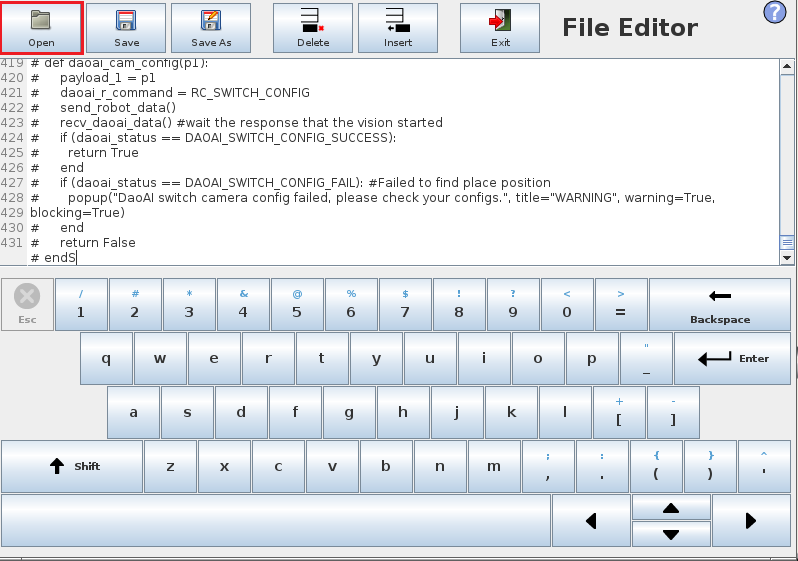
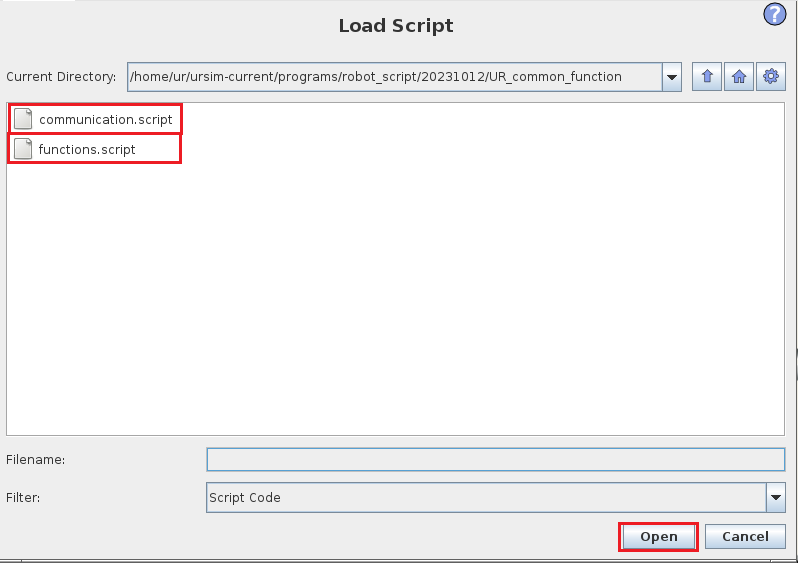
如果这里运行脚本时提示functions not found. 那么请重新将functions.script 和 communications.script 从UR_Common_function文件夹里加载一次。