You're reading the documentation for a development version. For the latest released version, please have a look at master.
Scene Crop Node
Overview
The Scene Crop Node uses segmentation results to crop a Point Cloud and output a vector of clouds corresponding to each segment.
Input and Output
Input |
Type |
Description |
|---|---|---|
Segment Results |
vector<Segm> |
Segmentation result of objects. Usually from DL Segment, Segmentation node. |
Scene Cloud |
pointCloud |
The scene point cloud to be cropped. Usually from Camera, Cloud Process node. |
Use Surface Centroid |
bool |
Whether to compute the centroid of the segmented point cloud when computing segmentPoses. |
Output |
Type |
Description |
|---|---|---|
segmentClouds |
SVecCloud |
A vector of point cloud, representing the cropped point cloud for each segment. |
segmentPoses |
vector<Pose> |
Poses of each point cloud, if the scene cloud has normals (from cloud process node), this pose will represent the surface normal of the segment. |
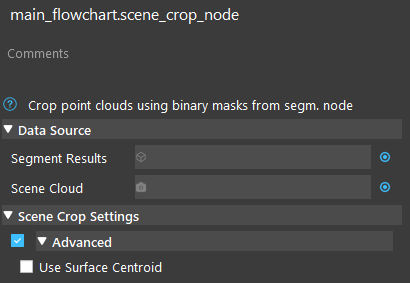
Node Settings
Data Source
- Segment Results
Segmentation result of objects. Usually from DL Segment, Segmentation node.
- Scene Cloud
3D point cloud representing the scene. Usually from Camera, Cloud Process node.
Scene Crop Settings

- Use Surface Centroid (Default: false)
Whether to compute the centroid of the segmented point cloud when computing segmentPoses.
Procedure to Use
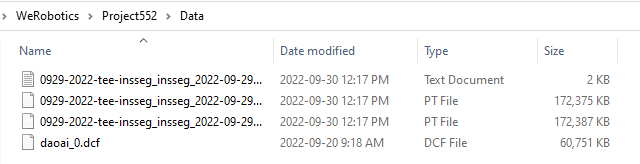
We will need a few more nodes to demonstrate Scene Crop node. Here are the files that you might need.
- Insret Camera, DL Segment, and Scene Crop.
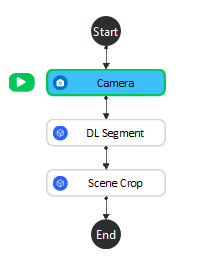
- Add a virtual camera with the daoai_0.dcf. See Camera Node for more detailed instructions.

- Make sure the models are stored in the project’s Data folder.
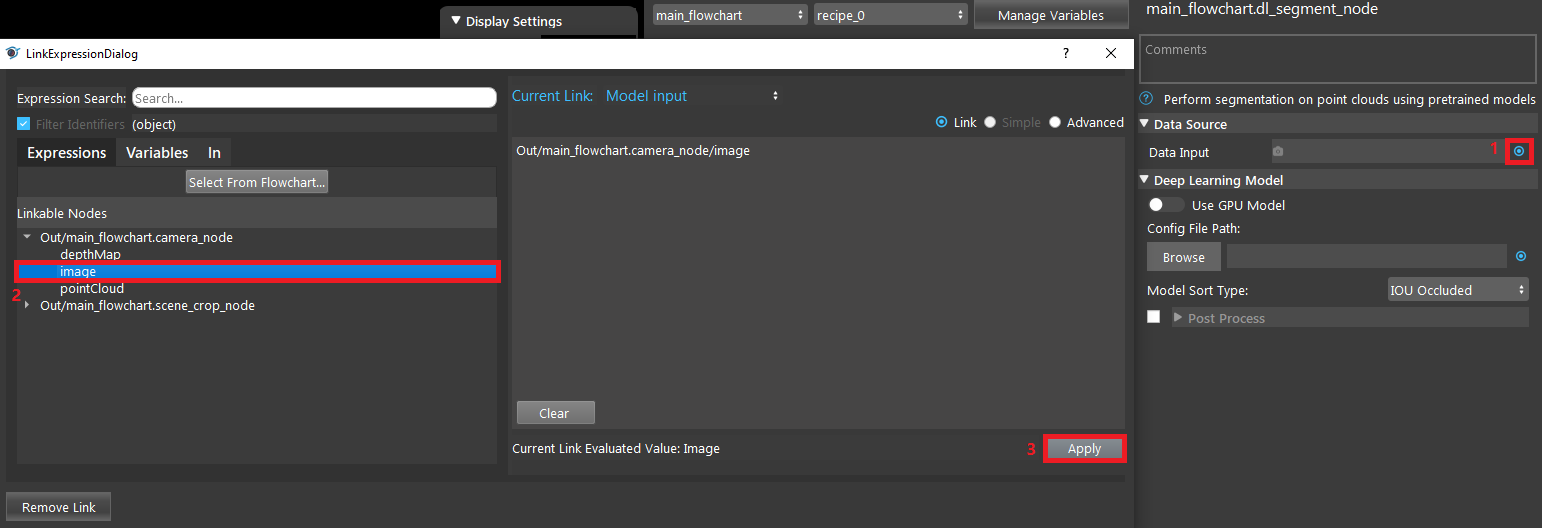
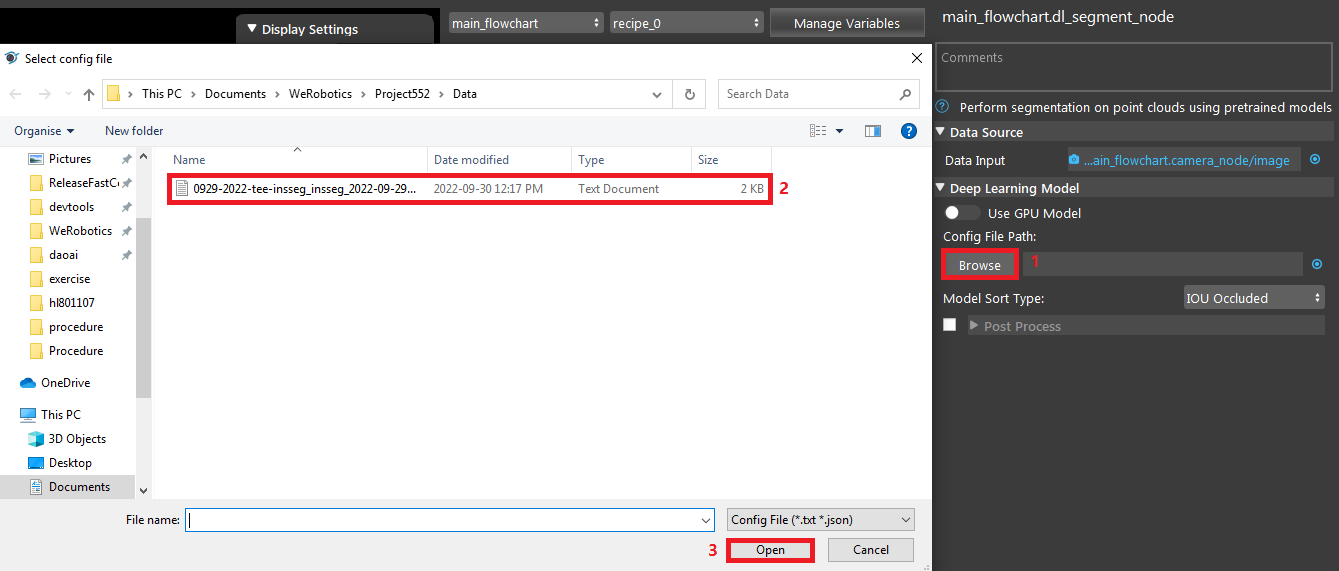
- In DL Segment, link camera’s image output to the Data Input, select the config file path, and run the node.

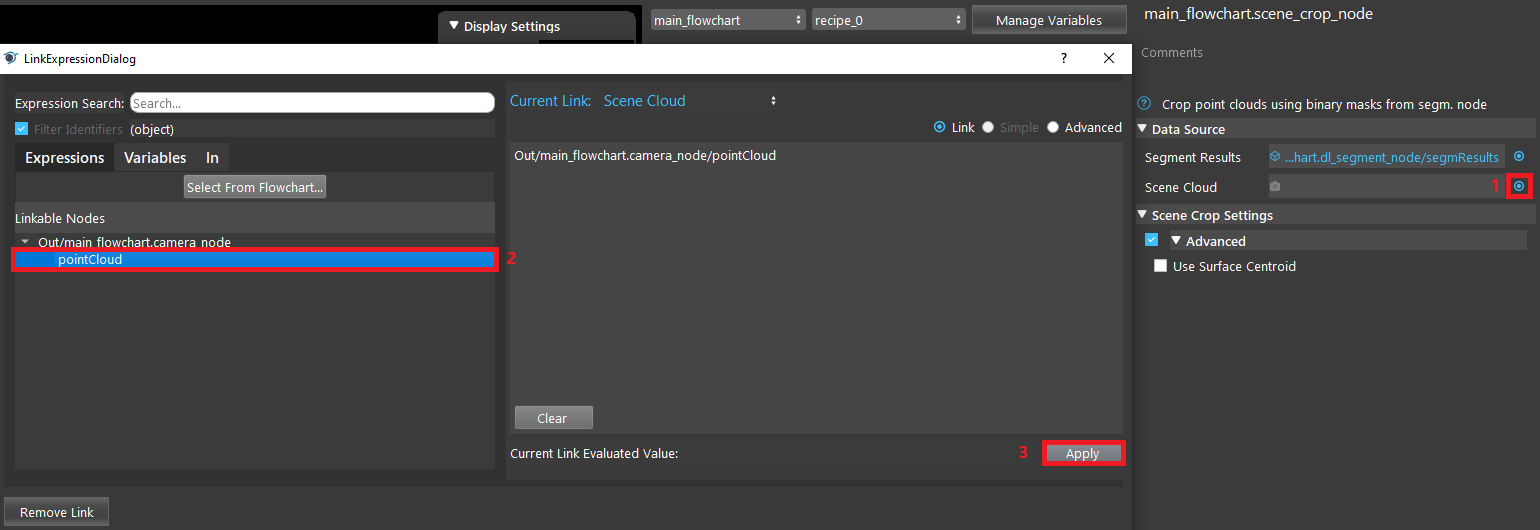
- In Scene Crop, link DL Segment’s output as the Segment Results. Since there is only one class in this image, you can pick either one of the two outputs.

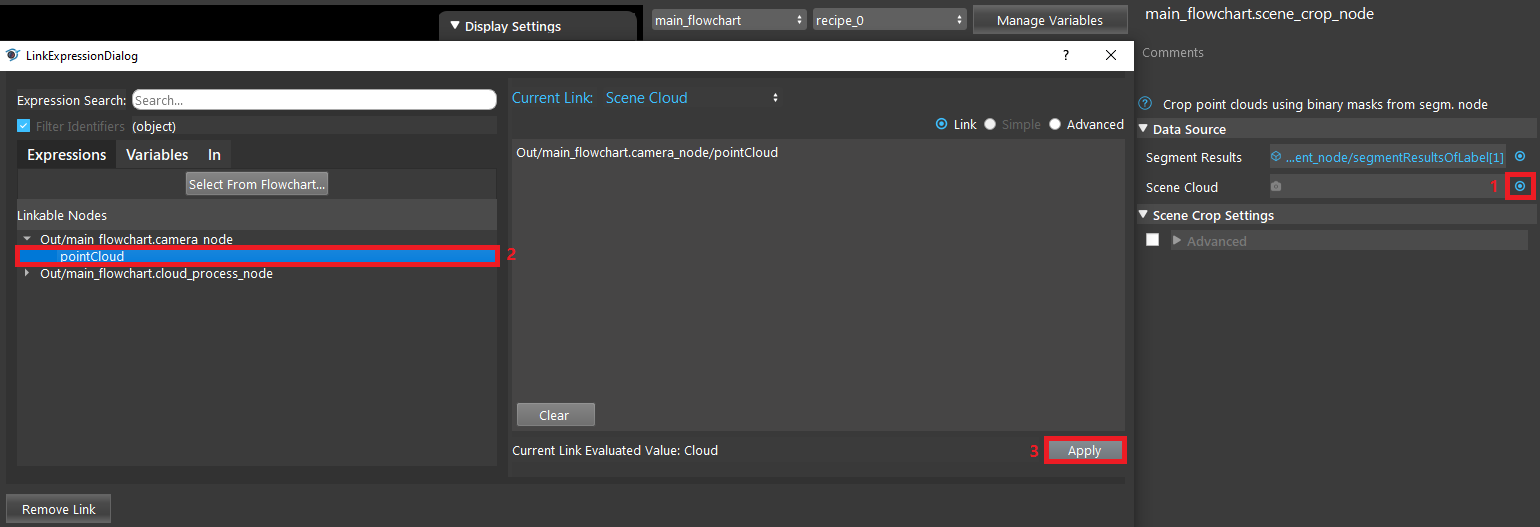
- In Scene Crop, link Camera’s pointCloud output as the Scene Cloud.
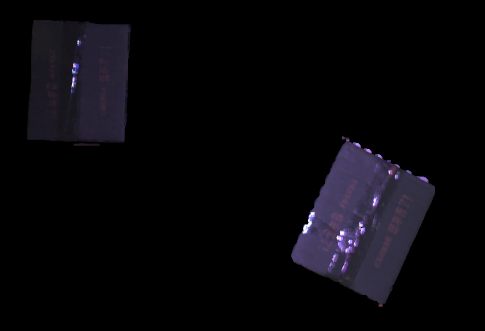
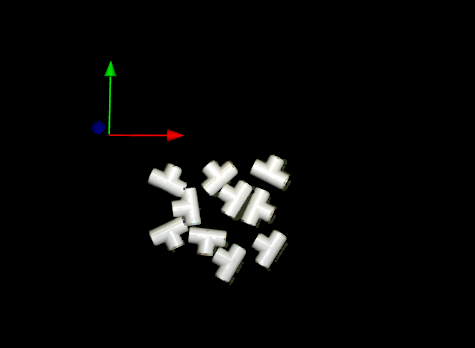
- Run the Scene Crop node, and you can see that the tee tubes are cropped out from the scene cloud.
Exercise
Here is the link to files .
Try to crop out the two dark green boxes in the following scene.

The flowchart should look the same as the one in Procedure to Use.
Answers for Exercise
- Please refer to Procedure to Use for the Camera and DL Segment setup. They are very similar.
-
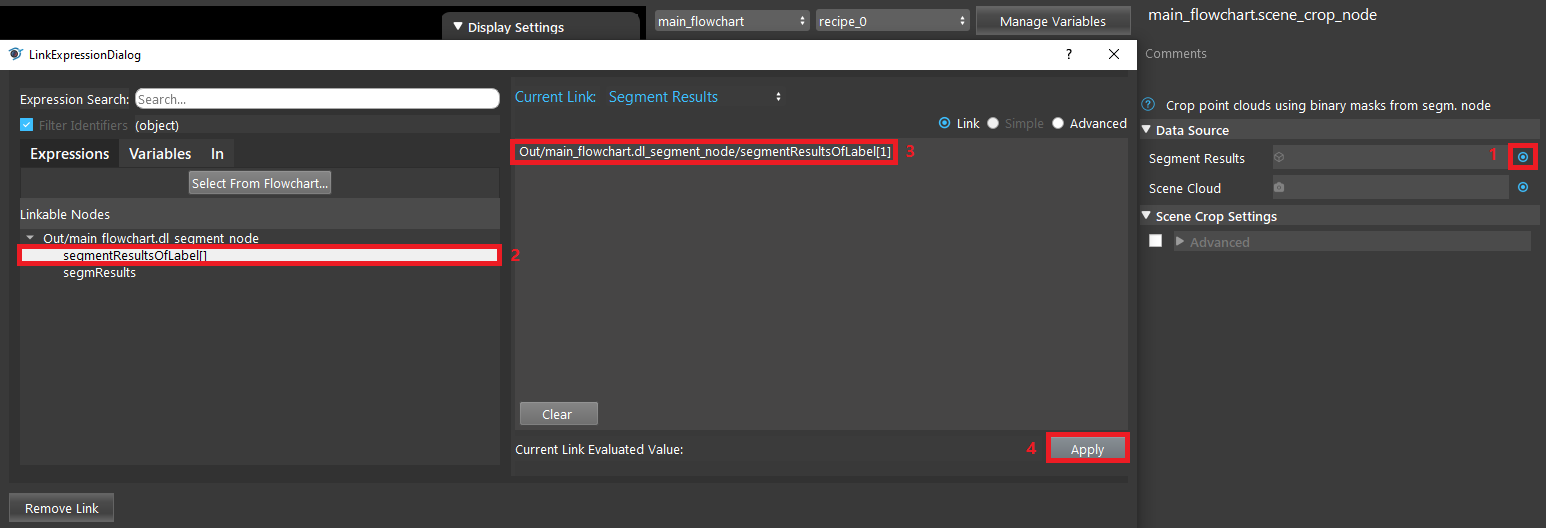
- Run the DL Segment node, and check the object’s class in the label. The label is “cls 1: green 99.91”, so the class is 1.

- Since the it is class 1 (cls 1), we need segmentResultsOfLabel[1] as the Segment Results in Scene Crop.
- Link Camera’s pointCloud as the Scene Cloud.
- Run the node, and we will have the two green boxes.