You're reading the documentation for a development version. For the latest released version, please have a look at master.
Writer Node
Overview
Writer node writes various types of data to files in disk. There are two modes available for writing data: From File, and From Numbered. If there are existing files with the same name when writing new files, the old files will be overwritten.
Input
Input |
Type |
Description |
|---|---|---|
Data Type |
Int32 |
The file type to write to. (one of .png, .tif, .pcd, .ply, .bag) |
Image |
Image |
The image to be written to the bag file. |
Point Cloud |
Cloud |
The point cloud to be written to the bag file. |
Depth Image |
Image |
The depth image to be written to the bag file. |
Pose |
Pose |
The pose to be written to the bag file. |
Intrinsic |
CameraIntrinsics |
The camera intrinsics to be written to the bag file. |
Node Settings
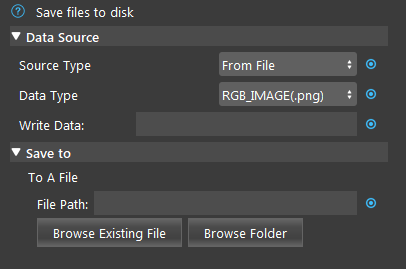
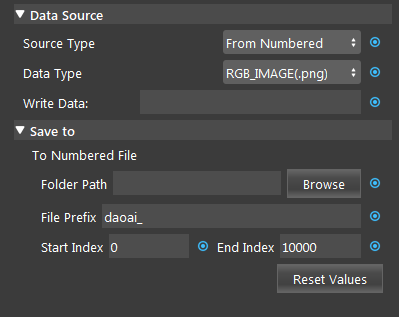
Data Source
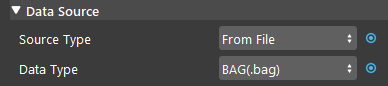
- Source Type (Default: From File):
From File: write data to one single file.
From Numbered: write data to multiple files.
- Data Type (Default: RGB_IMAGE (.png)):
- Select from one of the four output file types:
RGB_IMAGE (.png)
DEPTH_IMAGE (.tif)
POINT_CLOUD (.pcd)
POLYGON_MESH (.ply)
BAG (.bag)
- Write Data:
The data to be written to files.
Save to
- File Path:
Available in From File mode.
- File Prefix (Default: “daoai_”):
The string as the file name prefix.
- Start Index (Default: 0):
Index is the suffix number to be added to File Prefix. The starting index of the file to be saved.
- End Index (Default: 10000):
The ending index of the file to be saved. Index will reset to Start Index after exceeding the End Index.
- Reset Values:
Clicking this button will reset the file suffix index value
Warning
Writer node will overwrite exsiting file with same name.
Procedure to Use
Set up the Camera node, you can refer to Camera Node.
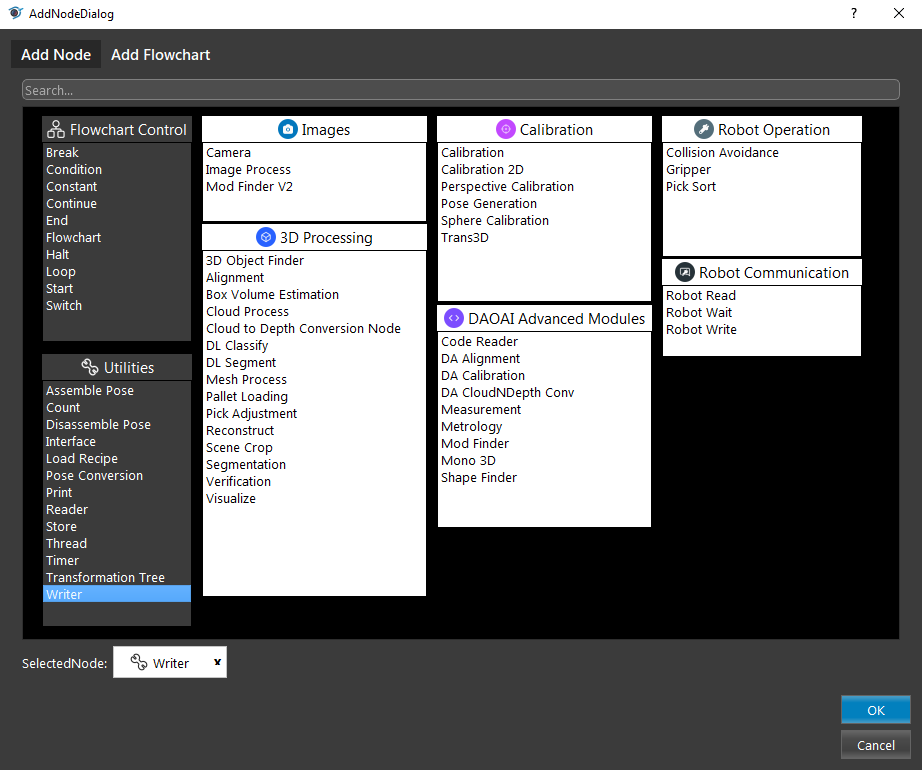
Insert a Writer node.
- Select Source Type and Data Type (will use “from file” and “save as .bag” as an example)
- link data to save (Image, Point Cloud, Depth Image, Intrinsic can all be linked to camera node, and Pose can be linked to robot read node).
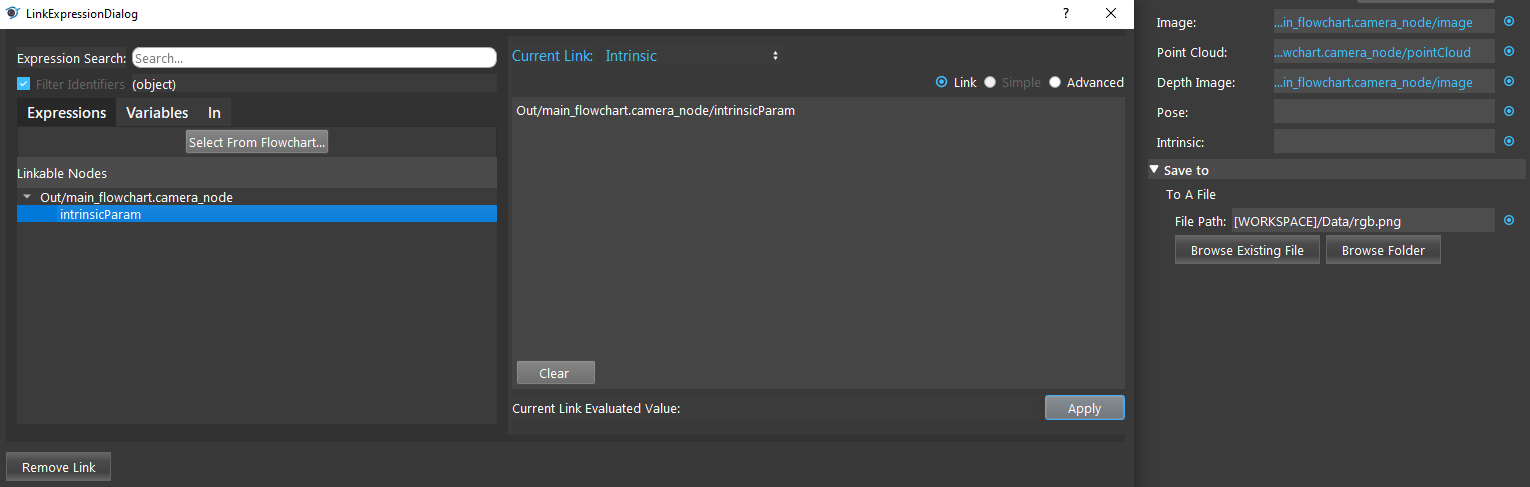
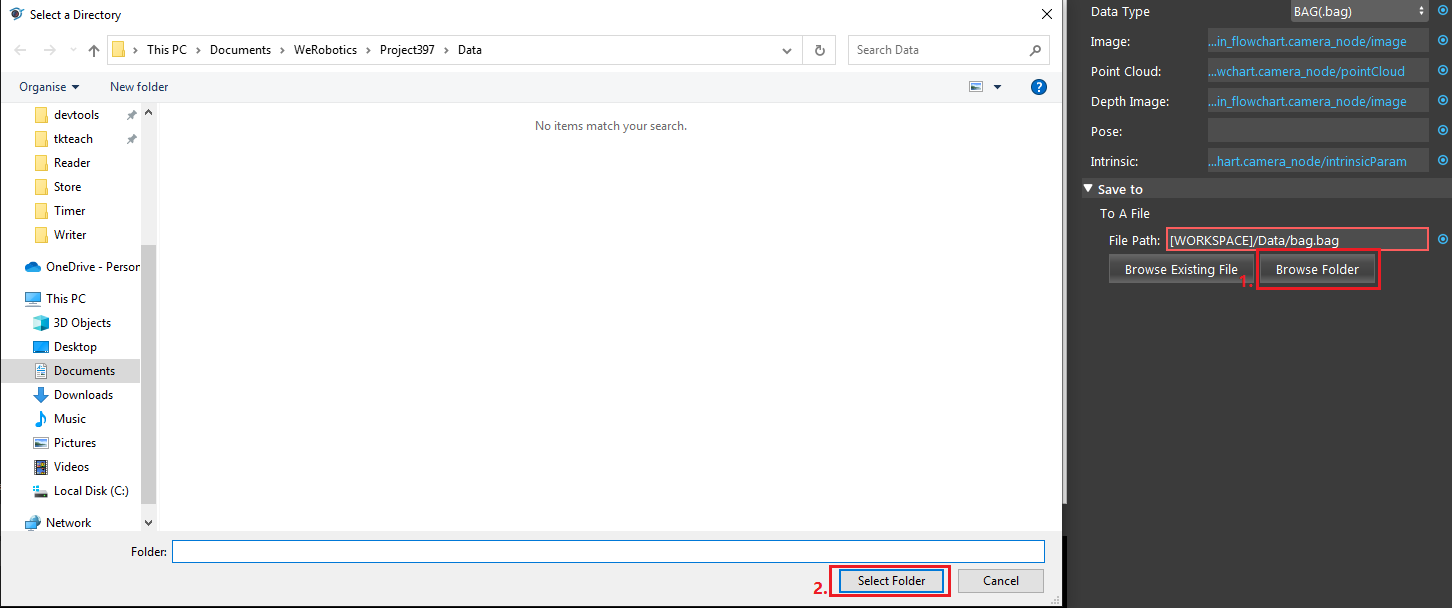
- Select a path to save, click browse folder and default path is “[workspace]/Data”, click “Select Folder”
- run the node and the file will be save to the specified directory.