You're reading the documentation for a development version. For the latest released version, please have a look at master.
Disassemble Pose Node
Overview
The Disassemble Pose node outputs 3 translation numbers and 3-4 rotation numbers (in degrees) from a 4x4 homogeneous transformation matrix.
Three main conventions are available for the rotation numbers:
Euler Angles: 3-number representation in the orders: XYZ, XZY, YXZ, YZX, ZXY, ZYX, and ZYZ.
Axis Angle: 3-number representation of axis with angle magnitude.
Quaternion: 4-number representation of a quaternion rotation.
Input and Output
Input |
Type |
Description |
|---|---|---|
Pose (Robot Read) |
Pose |
The Pose object to be disassembled |
Output |
Type |
Description |
|---|---|---|
posX |
Double |
Disassembled pose’s translation on X-axis. |
posY |
Double |
Disassembled pose’s translation on Y-axis. |
posZ |
Double |
Disassembled pose’s translation on Z-axis. |
rotA |
Double |
Disassembled pose’s rotation on X-axis. |
rotB |
Double |
Disassembled pose’s rotation on Y-axis. |
rotC |
Double |
Disassembled pose’s rotation on Z-axis. |
rotQ |
Double |
the rotation around the vector (only used for quaternion rotation). |
Settings
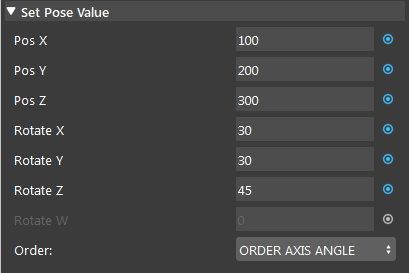
- Order :
Select from a dropdown list to choose the order of the generated pose. Orders are: XYZ, XZY, YXZ, YZX, ZXY, ZYX, ZYZ, Axis Angle and Quaternion.
Procedure to Use
- Right click the node where you want to insert and insert an Disassemble Pose node.
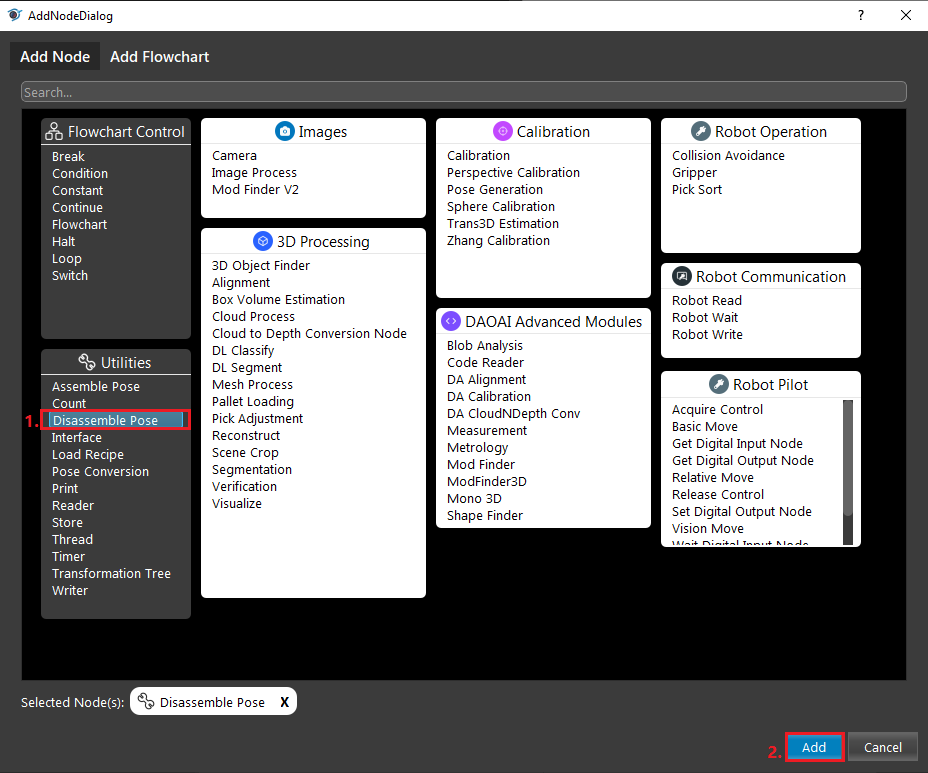
Link the Input Pose (used Assemble pose node as an example) and select an Order.
- Run the node an you will see the values printed on the console, you can also access them through outputs.